 Return to the range "Engineering Science"
Return to the range "Engineering Science"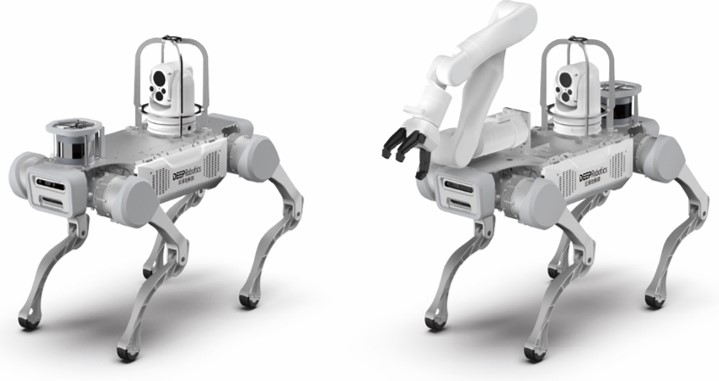


Jueying dog/quadruped robots
Automation of inspections and sensitive operations
 Robots chiens / Quadrupèdes Jueying
Robots chiens / Quadrupèdes Jueying Robots chiens
Robots chiens Related ranges :
Automation of inspections and sensitive operations
Jueying dog/quadruped robots can be used in industrial workshops, laboratories, subway corridors, and other sensitive tertiary spaces to perform routine inspections or obtain information about the premises (mapping, equipment identification, etc.).
They are also useful in complex and dangerous contexts, such as counterterrorism, rescue operations, bomb disposal, etc.
Jueying dog/quadruped robots feature the best in mobile robotics technology:
The advanced motion control algorithm enables them to walk, run, jump, leap, climb and descend stairs, stand upright, and perform other athletic functions.
Supplied with a free SDK for both motion control and perception for application development and learning.
These robots can be equipped with additional upper modules, such as a camera, a 4G/5G connection, an RTK/GPS system, a robot arm, an autonomous load, and more.
With their multi-line lidar based on SLAM laser technology, they can build accurate indoor and outdoor 3D maps, perform autonomous real-time positioning, autonomously plan the shortest path to the target, and identify static and dynamic obstacles to avoid them.
This product comes with a technical and educational file in digital format.
Automation & Robotics
Mechatronics
JY00: Jueying X20 dog/quadruped robot (IP66)
JY10 : Jueying quadruped/dog robot
JY11: NVIDIA Jetson Xavier NX GPU processor option
JY12: Multi-line lidar option for mapping and SLAM positioning
JY20 : Jueying Mini Standard quadrupedal robot dog (No lidar, remote control only)
JY21: Jueying Mini Standard quadrupedal robot dog (16-line lidar, remote control and autonomous SLAM)
V-Venture edition: Lite 3V quadrupedal robot dog (Explorer Edition: Wide-angle camera, No depth camera, No lidar, No graphics chip, Remote control only)
P-Professional Edition: Lite 3P quadrupedal robot dog (Professional Edition: Wide-angle camera, depth camera, no lidar, Nvidia Jetson Xavier NX graphics chip, remote control only)
L-Lidar Edition: Lite 3L quadruped robot dog (Lidar Edition: Wide-angle camera, Depth camera, 16-line lidar, Nvidia Jetson Xavier NX graphics chip, Remote control and autonomous SLAM)