 Volver a la gama "Estudios & Concepción Tecnológica"
Volver a la gama "Estudios & Concepción Tecnológica"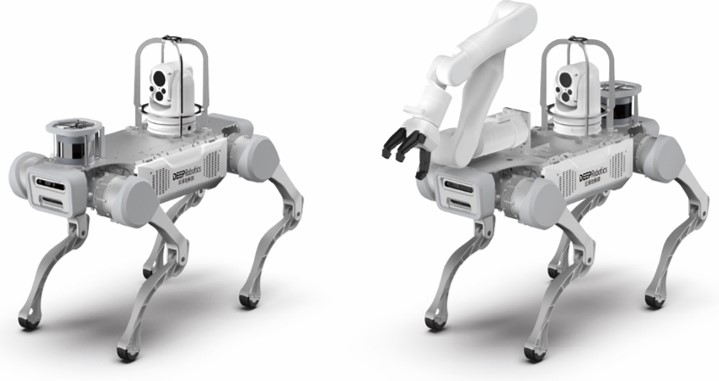


Robots perros / Cuadrúpedos Jueying
Automatización de inspecciones y operaciones delicadas
 Robots chiens / Quadrupèdes Jueying
Robots chiens / Quadrupèdes Jueying Robots chiens
Robots chiens Gamas asociadas :
Automatización de inspecciones y operaciones delicadas
Los robots perros/cuadrúpedos Jueying pueden utilizarse en talleres industriales, laboratorios, pasillos de metro y otros espacios terciarios sensibles para realizar inspecciones rutinarias u obtener información sobre los lugares (cartografía, identificación de equipos, etc.).
También son útiles en contextos complejos y peligrosos, como la lucha contra el terrorismo, el rescate, la eliminación de bombas...
Los robots perros/cuadrúpedos Jueying incorporan lo mejor de las tecnologías de robótica móvil:
El algoritmo avanzado de control de movimiento les permite caminar, correr, saltar, brincar, subir y bajar escaleras, mantenerse de pie y realizar otras funciones deportivas.
Se suministra con un SDK gratuito tanto para el control del movimiento como para la percepción para el desarrollo de aplicaciones y el aprendizaje.
Estos robots pueden equiparse con módulos superiores adicionales, como una cámara, una conexión 4G/5G, un sistema RTK/GPS, un brazo robótico, una carga autónoma...
Con su lidar multilínea basado en la tecnología láser SLAM, pueden construir mapas 3D interiores y exteriores precisos, realizar un posicionamiento autónomo en tiempo real, planificar de forma autónoma la ruta más corta hasta el objetivo e identificar los obstáculos estáticos y dinámicos para evitarlos.
Este producto se acompaña de un dossier técnico y pedagógico en formato digital.
Automatismos y robótica
Mecatrónica
JY00: Robot perro/cuadrúpedo Jueying X20 (IP66)
JY10 : Robot perro / cuadrúpedo Jueying
JY11 : Opción procesador GPU NVIDIA Jetson Xavier NX
JY12 : Opción Lidar multilínea de cartografía y posicionamiento SLAM
JY20 : Robot perro/cuadrupédico Jueying Mini Standard (sin lidar, solo control remoto)
JY21 : Robot perro/cuadrupédico Jueying Mini Standard (Lidar de 16 líneas, control remoto y SLAM autónomo)
V-Venture edition: Robot perro/cuadrupédico Lite 3V (Explorer Edition: cámara gran angular, sin cámara de profundidad, sin lidar, sin chip gráfico, solo control remoto)
P-Professional Edition: Robot perro/cuadrupédico Lite 3P (Professional Edition: cámara gran angular, cámara de profundidad, sin lidar, chip gráfico Nvidia Jetson Xavier NX, solo control remoto)
L-Lidar Edition: Robot perro/cuadrupedo Lite 3L (Lidar Edition: cámara gran angular, cámara de profundidad, lidar de 16 líneas, chip gráfico Nvidia Jetson Xavier NX, control remoto y SLAM autónomo)