 Return to the range "Engineering Science"
Return to the range "Engineering Science"
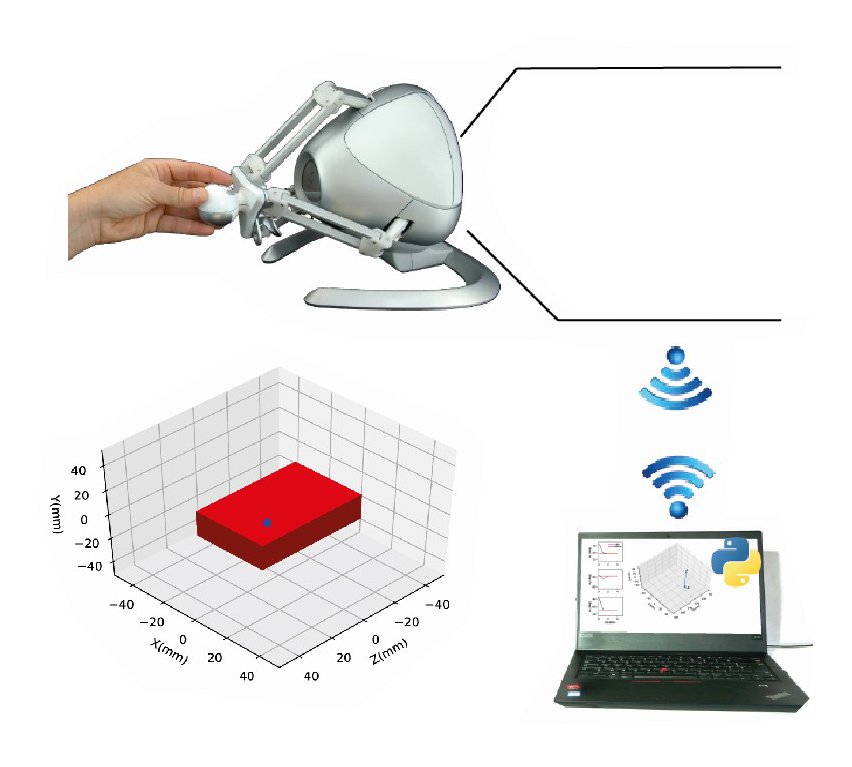




Haptic Robot IO
SI/NSI/STI2D/CPGE/Univ
SI/NSI/STI2D/CPGE/Univ
HIO teaching aid for implementing a virtual reality interface.
The student is both user and programmer.
Python programming, remotely, via the Spyder IDE: use of Python function libraries (provided) to dictate the behavior of the interface.
Connection can be set up in Python, according to different protocols such as the Internet Protocol or the Bluetooth protocol.
The haptic interface becomes a connected smart object.
As a user, the student can validate the behavior and performance of the interface and physically feel the virtual behavior they have implemented.
Autonomous and open haptic human-machine interface: controlled by a microcomputer (Raspberry Pi).
Requires the use of fundamental algorithms in numerical methods and interfacing via network protocols.
Connected Intelligent Haptic Interface:
Digital support including:
Algorithms
Digital engineering and simulation
HIO teaching aid for implementing a virtual reality interface.
The student is both user and programmer.
Autonomous and open haptic human-machine interface: controlled by a microcomputer (Raspberry Pi)
SHAP : Haptic Robot
SHAP-CPGE: Haptic Robot Set for CPGE activities
SHAPIO: Haptic robot with Python development kit
SHAPARD: Option: Haptic Robot Project with ARDUINO board.
SHAP-BM: Option: Haptic robot instrumentation bench for CPGE applications (without robot)
SHAPRS: Option: Non-educational Haptic Robot
 Robot Haptique HIO
Robot Haptique HIO