 Revenir dans la gamme "Technologies et sciences industrielles"
Revenir dans la gamme "Technologies et sciences industrielles"




Robot Haptique IO
SI/NSI/STI2D/CPGE/Univ
SI/NSI/STI2D/CPGE/Univ
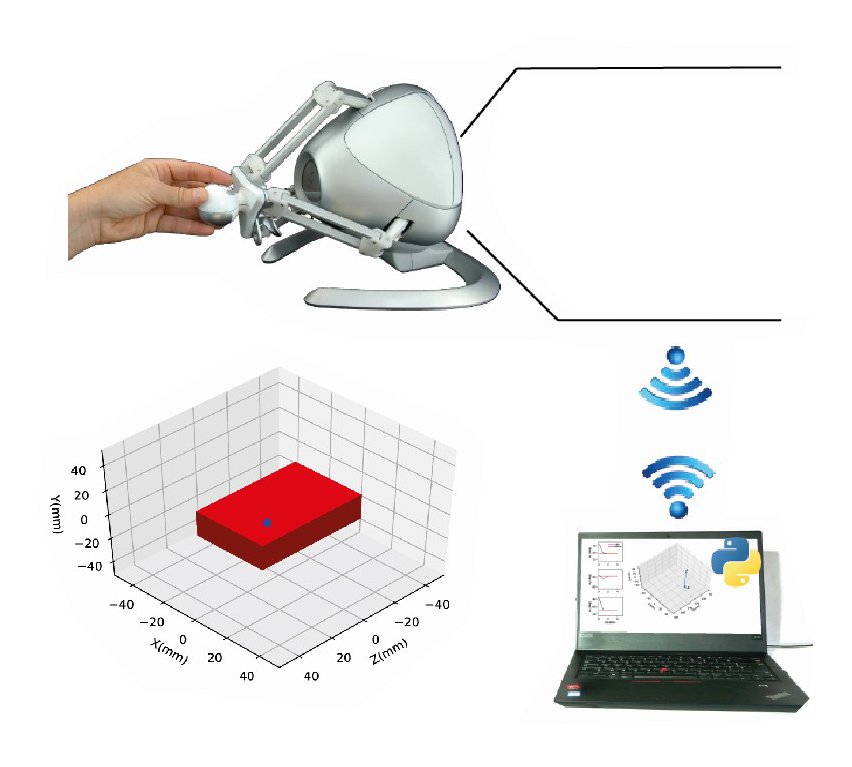
Support didactique HIO pour la mise en oeuvre d’une interface de réalité virtuelle.
L’élève est à la fois utilisateur et programmeur.
Programmation python, à distance, via l’IDE Spyder : utilisation des bibliothèques de fonctions Python (fournies) pour imposer le comportement de l’interface.
Connexion peut être mise en place en Python, selon différents protocoles comme le Protocole Internet ou le protocole BlueTooth.
L’interface haptique devient un objet intelligent connecté.
En tant qu’utilisateur, l’élève peut valider le comportement et les performances de l’interface, et ressentir physiquement le comportement virtuel qu’il a mis en place.
Interface homme-machine haptique autonome et ouverte : pilotée par un microordinateur (Raspberry Pi)
Impose l’usage des algorithmes fondamentaux en Méthodes Numériques, et son interfaçage par des protocolesréseaux.
Interface Haptique Intelligente Connectée :
Un support numérique comprenant :
Algorithmie
Ingénierie numérique et simulation
Support didactique HIO pour la mise en oeuvre d’une interface de réalité virtuelle.
L’élève est à la fois utilisateur et programmeur.
Interface homme-machine haptique autonome et ouverte : pilotée par un microordinateur (Raspberry Pi)
SHAP : Robot Haptique
SHAP-CPGE : Ensemble Robot Haptique pour activités CPGE
SHAPIO : Robot haptique avec kit de développement Python
SHAPARD : Option : Robot Haptique Projet avec carte ARDUINO.
SHAP-BM : Option : Banc d'instrumentation robot haptique pour applications CPGE (sans robot)
SHAPRS : Option : Robot Haptique non didactisé
 Robot Haptique HIO
Robot Haptique HIO