 Return to the range "Automation, Control & Process"
Return to the range "Automation, Control & Process"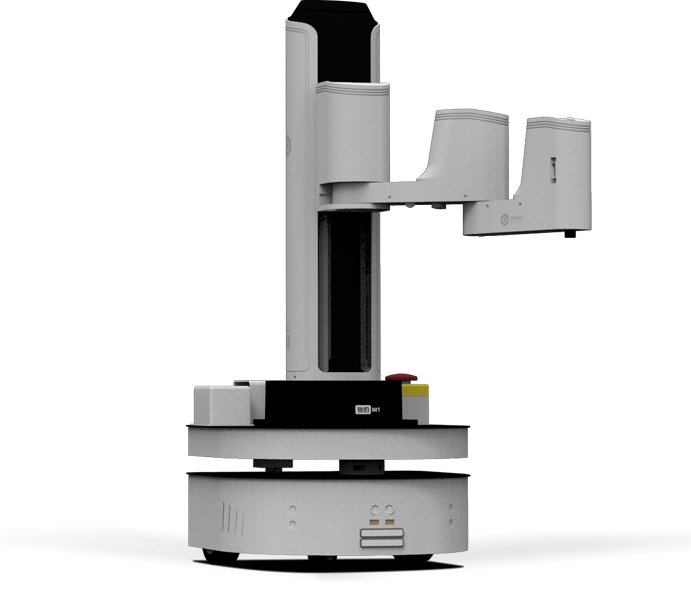





Dobot M1 4-axis Scara robot
Dobot M1 4-axis Scara robot
Doc. commercial Eng
 Robot Dobot
Robot DobotSite Internet
 Dobot M1
Dobot M1Vidéo
Related ranges :
Dobot M1 4-axis Scara robot
The Dobot M1 is a robotic arm known as a SCARA (Selective Compliance Assembly Robot Arm), rigid on the Z axis and flexible on the XY axes.
It is also collaborative and does not require a safety enclosure.
It is mainly used in the industry of the future for many applications, including assembly (Pick And Place).
4-axis SCARA robot, 400 mm reach, 1.5 kg payload
Repeatability +/- 0.2 mm
Range of motion: Z (250 mm) J1 (+/-90°) J2 (+/- 135°) R (+/- 360°)
Maximum speeds: Z (1 m/s) J1 (160°/s) J2 (160°/s) J1+J2 (2 m/s)
Inputs/outputs: 8 24V inputs - 8 24V outputs
Control/command card: ARM Cortex-A9 + ARM Cortex-M4 + FPGA
Connectivity: Ethernet, RS232, USB Operating system: Linux Software: M1 studio Power supply: 100-240V 50-60HzPossible extensions:
Introduction to Scara robots and their kinematics
Creation of a simple pick-and-place program using loops and/or vision sensors
Suggested scenarios:
DB00: DOBOT M1 Scara robot incorporating:
DB01: Basic effectors for Dobot M1 including:
DB04: Maker kits for Dobot M1 including:
DB02: Expansion connectors for Dobot M1 including:
DB03: HD industrial color camera for Dobot (Sensor size: 1/2.5"CMOS - Frequency/Resolution: 31fps @ 2592×1944)
DB05: Conveyor belt for Dobot with infrared distance sensor, heart sensor, wooden cubes