 Volver a la gama "Automatismos & Ingeniería de procesos"
Volver a la gama "Automatismos & Ingeniería de procesos"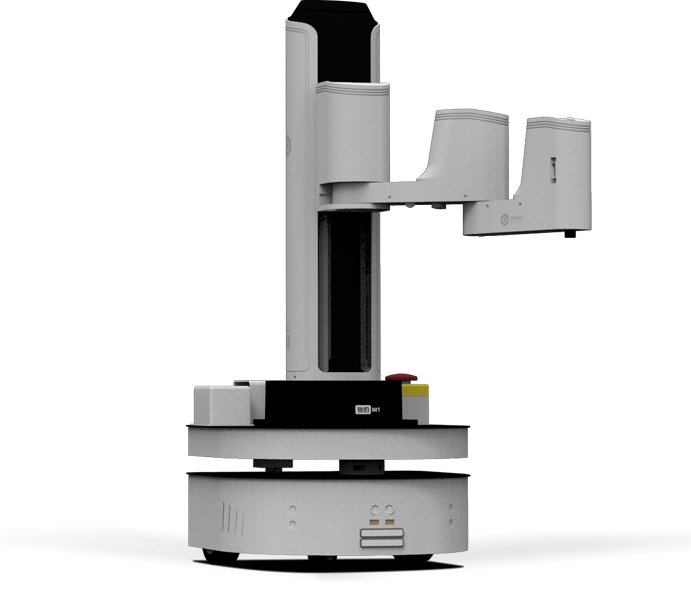





Robot Scara de 4 ejes Dobot M1
Robot Scara de 4 ejes Dobot M1
Doc. commercial Eng
 Robot Dobot
Robot DobotSite Internet
 Dobot M1
Dobot M1Vidéo
Gamas asociadas :
Robot Scara de 4 ejes Dobot M1
El Dobot M1 es un brazo robótico denominado SCARA (Selective Compliance Assembly Robot Arm), rígido en el eje Z y flexible en los ejes XY.
También es colaborativo y no requiere recinto de seguridad.
Se utiliza principalmente en la industria del futuro para numerosas aplicaciones, entre ellas la de ensamblaje (Pick And Place).
Robot SCARA de 4 ejes, alcance de 400 mm, carga de 1,5 kg
Repetibilidad +/- 0,2 mm
Amplitud de movimientos: Z (250 mm) J1 (+/-90°) J2 (+/- 135°) R (+/- 360°)
Velocidades máximas: Z ( 1 m/s) J1 (160°/s) J2 (160°/s) J1+J2 (2 m/s)
Entradas/salidas: 8 entradas de 24 V - 8 salidas de 24 V
Tarjeta de control/mando: ARM Cortex-A9 + ARM Cortex-M4 + FPGA
Conectividad: Ethernet, RS232, USB
Sistema operativo: Linux
Software: M1 studio
Alimentación 100-240 V 50-60 Hz
Posibles ampliaciones:
Descubrimiento de los robots Scara y su cinemática
Realización de un programa sencillo de pick and place, con uso de bucles y/o sensor de visión
Escenarios propuestos:
DB00: Robot Scara DOBOT M1 que integra:
DB01: Efectores básicos para Dobot M1 que incluye:
DB04: Kits maker para Dobot M1 que incluyen:
DB02: Conectores de extensión para Dobot M1 que incluyen:
DB03: Cámara industrial HD en color para Dobot (tamaño del sensor: 1/2,5" CMOS - frecuencia/resolución: 31 fps a 2592 × 1944)
DB05: Cinta transportadora para Dobot con sensor de distancia por infrarrojos, sensor de corazón, cubos de madera