 Return to the range "Engineering Science"
Return to the range "Engineering Science"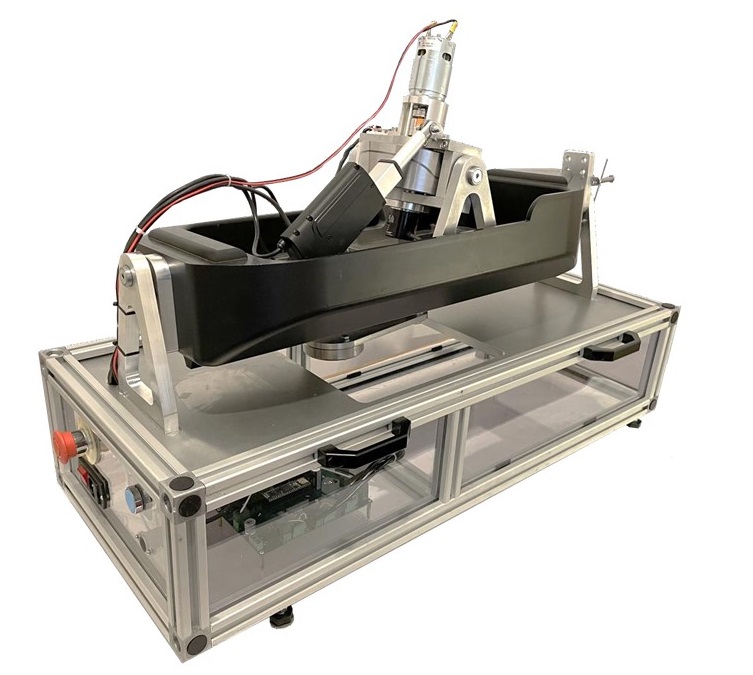

Gyroscopic boat stabilizer
CPGE/Univ
Doc. commercial Eng
 Stabilisateur gyroscopique de bateau
Stabilisateur gyroscopique de bateauDoc. commercial Fr
Vidéo
 Stabilisateur gyroscopique de bateau
Stabilisateur gyroscopique de bateauRelated ranges :
CPGE/Univ
The Gyroscopic Boat Stabilizer is an educational product designed based on the actual system, for teaching industrial engineering sciences.
This educational product is intended for use in CPGE PCSI/PSI - PTSI/PT, TSI and ATS courses.
The stabilizer has:
- a flywheel, controlled in terms of rotation speed (up to 4000 rpm).- an articulated gyroscope support frame, controlled by an electric actuator, with controlled rotation speed to impose a controlled gyroscopic torque. - an articulated overload controlled by an electric actuator, allowing the boat's center of gravity to be modified and a rolling motion to be imposed on it.
The three actuators are equipped with an encoder, and an inertial unit is attached to the articulated frame, enabling the following aspects of the program to be addressed:
TP1: DISCOVERING SYSTEMS
- Analyze the influence of the position of the overload on the boat's behavior
- Analyze the influence of the gyroscope's orientation and speed on the boat's behavior
- Identify the three functional chains
TP2: GEOMETRIC ANALYSIS
- Identify the structural chain for positioning the overload in order to determine the geometric I/O law
- Identify the structural chain for positioning the gyroscope frame in order to determine the geometric I/O law
WP3: SLCI PERFORMANCE AND MODELING
- Propose a behavior model for the various components of the overload movement position control chain and the performance of this control system
- Propose a behavior model for the various components of the speed control chain for the orientation of the flywheel and characterize the performance of this control system
WP4: CORRECTOR
- Choose a corrector based on the open-loop behavior of the gyroscope orientation
TP5: MODELING OF MECHANICAL ACTIONS
- Determine the boat's heel based on the position of the overload in order to deduce the equilibrium orientation of the assembly
TP6: KINETICS
- Determine the equivalent inertia of the power chain associated with the rotational speed of the flywheel
TP7: ENERGY
- Describe the flywheel start-up process that minimizes energy consumption (limited on a boat).
TP8: DYNAMICS, GYROSCOPIC TORQUE
- Study of the gyroscopic effect: determine the relationship between the rotational speed of the flywheel frame and the dynamic behavior of the boat.
- Address the issue of electrical energy availability on board a boat: implement a digital artificial intelligence (AI) solution to determine the flywheel start-up procedure.- Address the issue of electrical energy availability on board a boat: implement a numerical artificial intelligence (AI) solution to determine the least energy-intensive flywheel start-up procedure.
S2I//1900: Gyroscopic boat stabilizer