 Return to the range "Engineering Science"
Return to the range "Engineering Science"
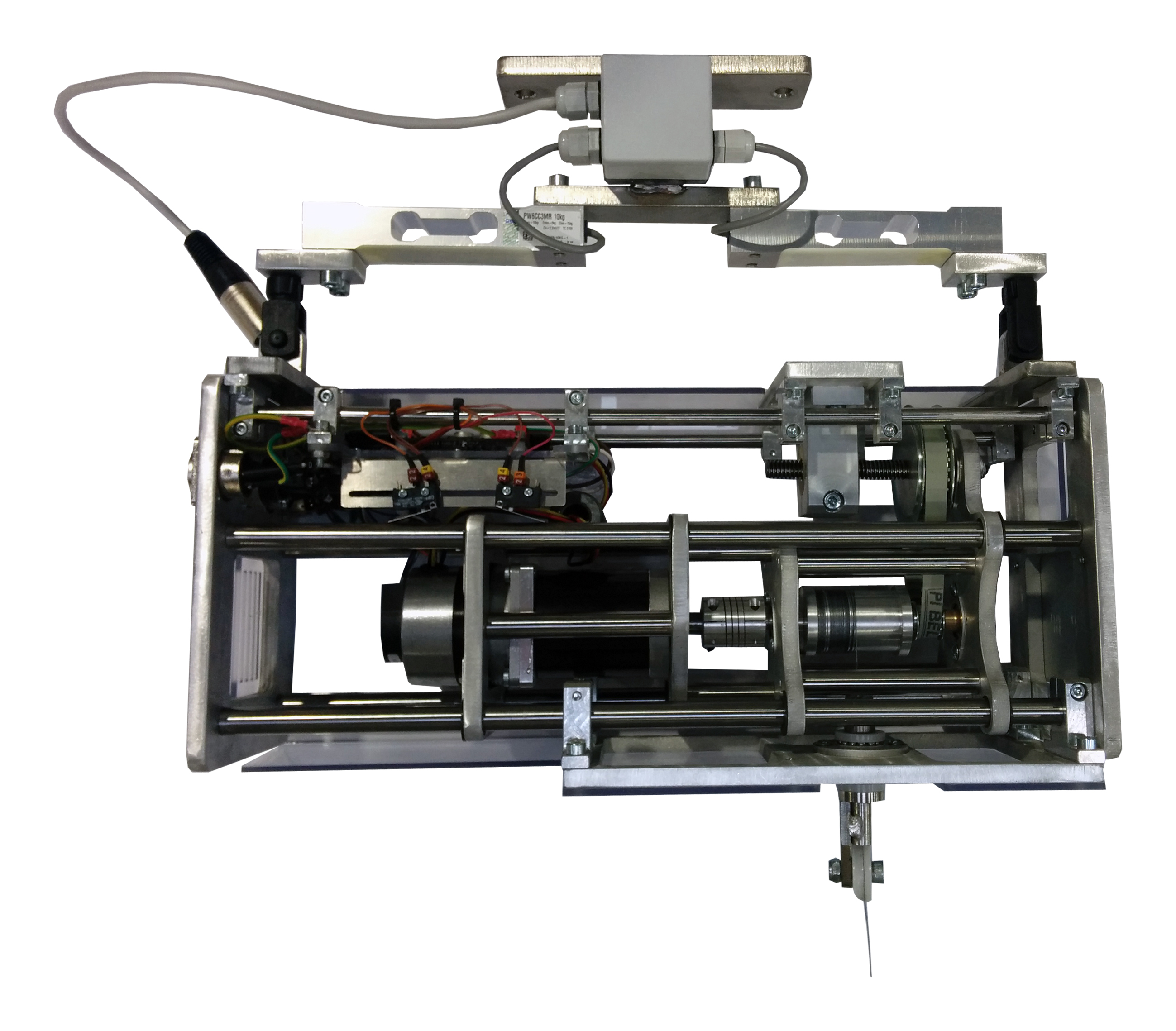


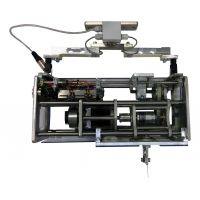




Cable robot for lifting assistance and 2D/3D positioning
Studies and projects on a cable-driven robot
Studies and projects on a cable-driven robot
Position, speed and load control
Motorization & Energy (brushless and DC motors, industrial motor controller board)
Measurement of loads and torques
Mechanical solutions for cross-winding (orderly cable rolling)
Video and image processing
Real-time LabVIEW control (myRIO board)
Communication (CAN bus)
SysML description: choice of motor, performance and efficiency
Kinematics (connection modelling and maximum speed)
Statics (determining the direction of cable pull based on the two load sensors)
State graph (load control with self-calibration to assist in lifting a variable mass)
Studying the operation of brushless motors (phase control curves) and comparison with DC motors
Study of sensors (hall effect, incremental optical encoder, load sensor based on strain gauge, on/off limit switch)
Study of mechanical solutions for cross-winding
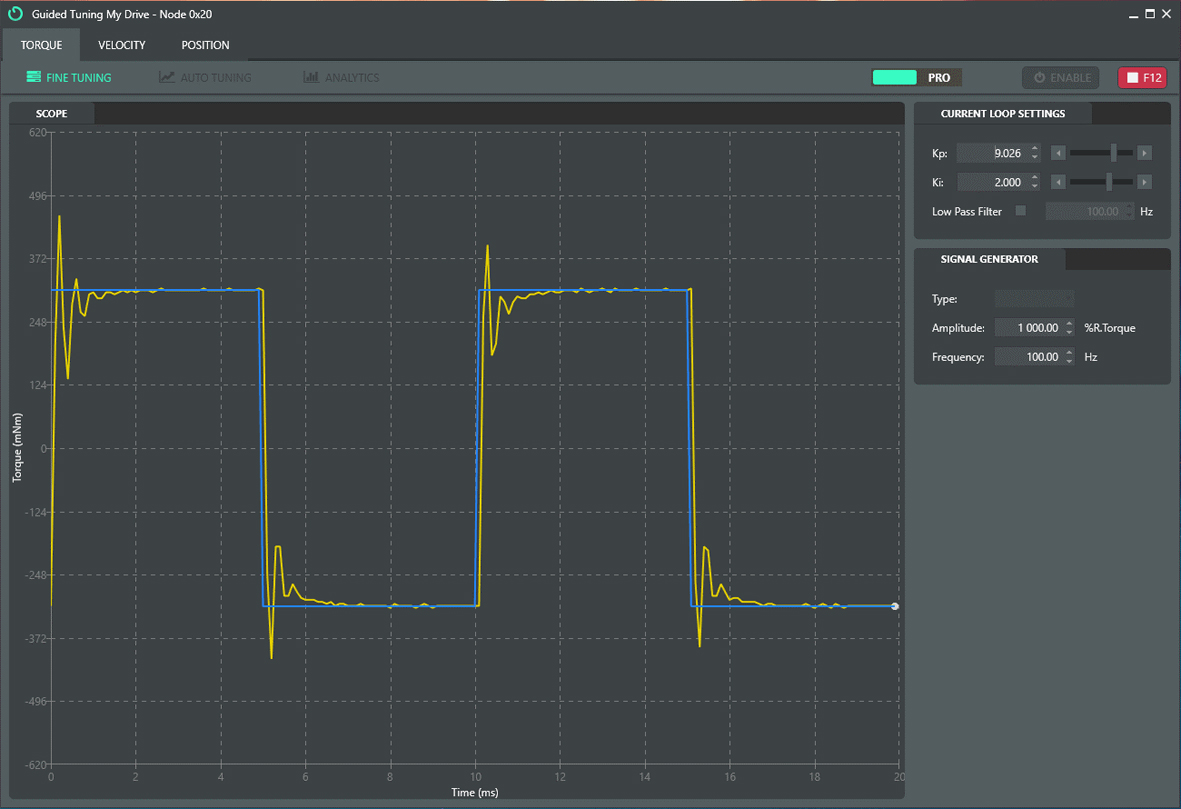
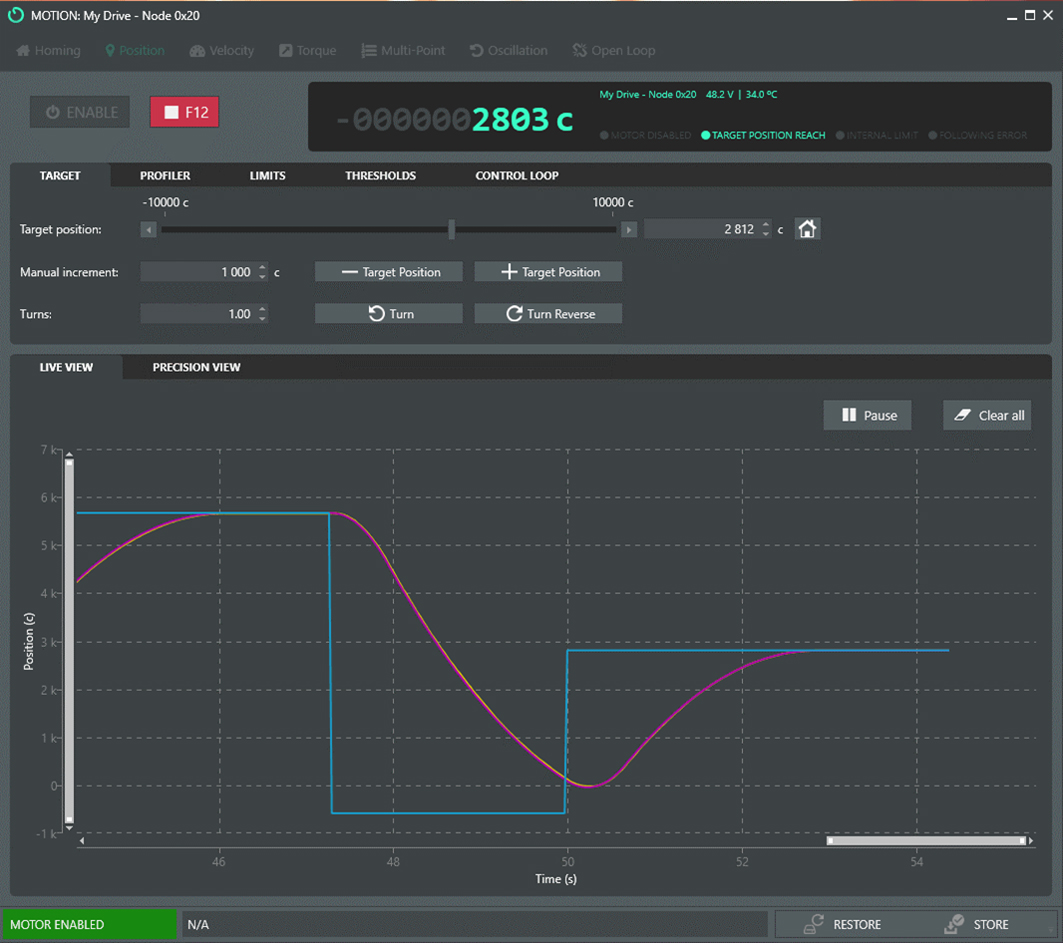
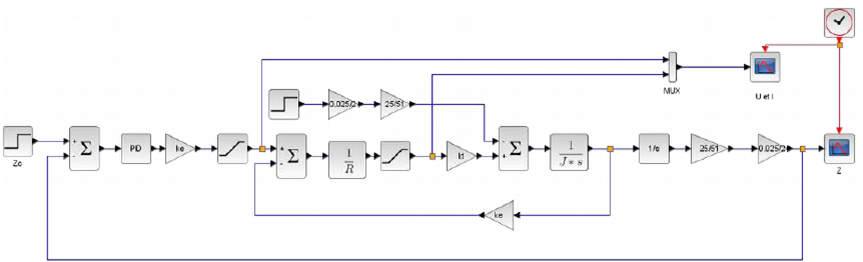
Analysis of position, speed and load control (e.g., torque control, experimental and theory-based determination)
Experimental optimization of control parameters (Autotune)
Integration of image analysis in control
Real-time LabVIEW programming
Study and configuration of a CAN bus
Generation and optimization of 1D, 2D or 3D trajectories of the gimbal compatible with the motorization
Project: Control development for solutions using 1 winding head (lifting
assistance) or 3 winding heads (2D/3D positioning)
Project: Design of a gimbal
Product evolution (scenarios using 1 / 3 winding heads, same control)
Complex mechanics of winding heads (cross-winding)
Comparison of DC and brushless motorizations
The test area can be placed horizontally (application type: Stadium camera movement) or vertically (application type: Painting robot)
Dual use of the camera: analysis of dynamic performance (fixed camera facing the robot), target tracking (camera on the gimbal of the robot)
WR00+WR11: Cable robot for lifting assistance (one brushless winding head)
WR10+NC00+NC01+WR11+WR11+WR11: Cable robot for 2D/3D positioning (three brushless heads) with real-time industrial electronic prototyping platform (NI myRIO with CAN board)
WR11: Winding head with brushless motorization
WR12: Winding head with DC motorization
 Robot à câbles
Robot à câbles