 Return to the range "Engineering Science"
Return to the range "Engineering Science"




NAO Humanoid Robot
Mobile robotic studying system
Doc. commercial Fr
 Documentation Robot humanoïde Nao
Documentation Robot humanoïde NaoPédagogie
Vidéo
 Nao joue au foot
Nao joue au footInformation supplémentaires
 Communication de NAO avec des applications externes Démarrrer avec la version 2.1
Communication de NAO avec des applications externes Démarrrer avec la version 2.1Related ranges :
Mobile robotic studying system
Communication de NAO avec des applications externes Démarrrer avec la version 2.1Audio(4 microphones and 2 loudspeakers)
Video(2 HD cameras 1200 x 960)
Inertial unit (3-axis accelerometer, and 2-axis gyrometer) and Sonars
Sensors (pressure FSR, bumpers, tactile)
Servo-motors (coreless motors withhall effect sensors)
Grip (prehensile hands with 3 operable fingers)
Intel Atom 1.6 GHz CPU with 1 GB RAM and 8 GB Micro SDHC (text-to-speech, Image and voice recognition…)
WiFi and Ethernet modules
Lithium-ion battery (90 minutes autonomy)
Functional analysis and SysMLdescription
Information chain architecture
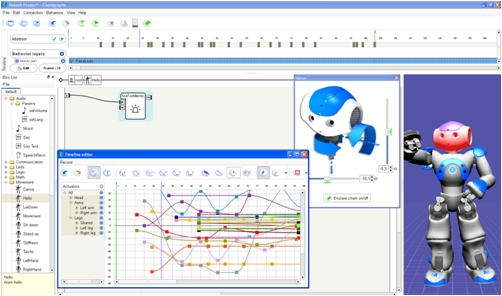
Study of motion andcommunication
Study of controllers used on NAO
Development and testing of new algorithms(eg: sight…)
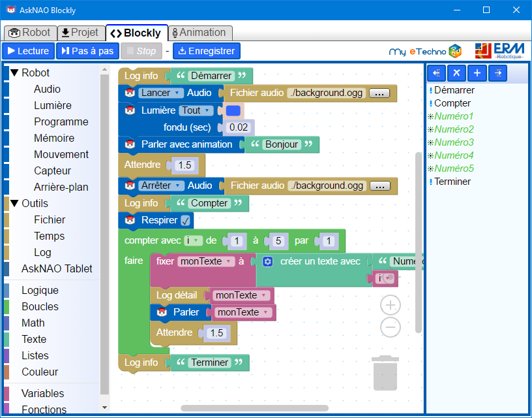
Project: Develop applications for NAO, invent missions for NAO
Project: Design software architecture for activities (eg: NAO monitors a room)
Motivating and fun for students, and a medium of communication for the institution
Open environment (Software suite for programming and data logging...)
AR//H25-EA: NAO humanoid Robot with SDK, Choregraphe, Monitor, 10 licenses-
AR//SW-WNAO: Webots software for NAO, 1 license
NA10: Accessory kit for training activities (weights, ultrasonic sensors, Wi-Fi router, IR Remote control...)
NA11: Training system for NAO Foot+Ankle control
NA12: “Foot+Ankle” mechanical set
AR//SW-CSDK-U: Software suite Choregraphe, Monitor, SDK, site license
AR//SW-WNAO10: Webots software for NAO, 10 licenses