 Return to the range "Engineering Science"
Return to the range "Engineering Science"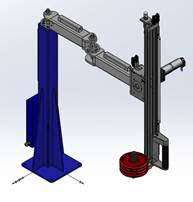
COMAX-Collaborative robot (CoBot) Single axis
CPGE
 Sous-système Poignée
Sous-système Poignée Fiche produit
Fiche produitRelated ranges :
CPGE
CoMax assists humans at work and reduces the risk of MSDs (musculoskeletal disorders). It is continuously controlled by humans via an intuitive and collaborative control system, allowing tasks to be performed without lifting effort.
The collaborative control measures the user's intention through the force applied to the handle (force sensor) and calculates the dynamic reaction of the robot accordingly.
The "HANDLE" subsystem is designed to study the interaction handle of the "CoMax" robot and condition its sensor signal.
- Collaborative control
- Configuration of collaborative control
- Visualization of control loops and synoptic physical quantities
- Control without collaborative control, current, speed, speed profile, position, and position profile servo control - Servo control parameter adjustment - Reversible axis responses with variable load to conventional stressesDD//COMAX: Single-axis collaborative robot
DD//S/SCOMAX: COMAX robot handle subsystem