 Volver a la gama "Estudios & Concepción Tecnológica"
Volver a la gama "Estudios & Concepción Tecnológica"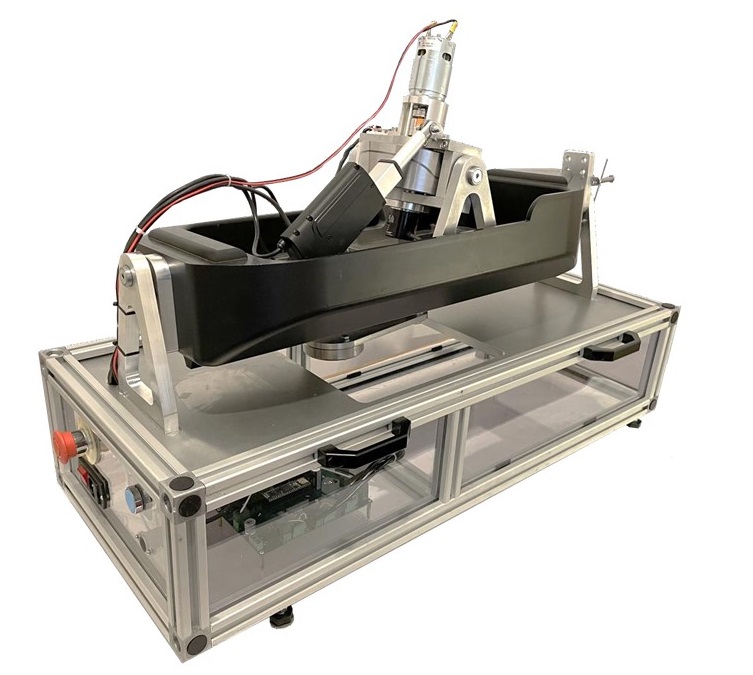

Estabilizador giroscópico para barcos
CPGE/Univ
Doc. commercial Eng
 Stabilisateur gyroscopique de bateau
Stabilisateur gyroscopique de bateauDoc. commercial Fr
Vidéo
 Stabilisateur gyroscopique de bateau
Stabilisateur gyroscopique de bateauGamas asociadas :
CPGE/Univ
El estabilizador giroscópico para barcos es un producto didáctico diseñado a partir del sistema real, para la enseñanza de las ciencias industriales de la ingeniería.
Este producto didáctico está destinado a las ramas CPGE PCSI/PSI - PTSI/PT, TSI y ATS.
El estabilizador cuenta con:
- un volante de inercia, controlado en velocidad de rotación (hasta 4000 rpm).
- un bastidor de soporte del giroscopio articulado, controlado por un cilindro eléctrico, con velocidad de rotación controlada que permite imponer un par giroscópico controlado
- una sobrecarga articulada controlada por un cilindro eléctrico, que permite modificar el centro de gravedad del barco e imponerle un movimiento de balanceo
Los tres actuadores están equipados con un codificador y una central inercial está fijada al bastidor articulado, medidas que permiten tratar los siguientes puntos del programa:
TP1: DESCUBRIR LOS SISTEMAS
- Analizar la influencia de la posición de la sobrecarga en el comportamiento del barco
- Analizar la influencia de la orientación y la velocidad del giroscopio en el comportamiento del barco
- Identificar las 3 cadenas funcionales
TP2: ANÁLISIS GEOMÉTRICO
- Identificar la cadena estructural de posicionamiento de la sobrecarga para determinar la ley E/S geométrica
- Identificar la cadena estructural de posicionamiento del marco del giroscopio para determinar la ley E/S geométrica
TP3: RENDIMIENTO Y MODELIZACIÓN DE LOS SLCI
- Proponer un modelo de comportamiento de los diferentes componentes de la cadena de servocontrol en posición del movimiento de la sobrecarga y el rendimiento de este servocontrol
- Proponer un modelo de comportamiento de los diferentes componentes de la cadena de servocontrol de velocidad de la orientación del volante de inercia y caracterizar el rendimiento de este servocontrol.
TP4: CORRECTOR
- Elegir un corrector en función del comportamiento en bucle abierto de la orientación del giroscopio.
TP5: MODELIZACIÓN DE LAS ACCIONES MECÁNICAS
- Determinar la escora del barco en función de la posición de la sobrecarga para deducir la orientación de equilibrio del conjunto
TP6: CINÉTICA
- Determinar la inercia equivalente de la cadena de potencia asociada a la velocidad de rotación del volante de inercia.
TP7: ENERGÍA
- Describir el proceso de arranque del volante de inercia que permite minimizar el consumo de energía (limitado en un barco).
TP8: DINÁMICA, PAR GIROSCÓPICO
- Estudio del efecto giroscópico: determinar la relación entre la velocidad de rotación del marco del volante de inercia y el comportamiento dinámico del barco
TP9: OPTIMIZACIÓN ENERGÉTICA DEL ARRANQUE DEL VOLANTE DE INERCIA
- Responder al problema de la disponibilidad de energía eléctrica a bordo de un barco: implementar una resolución numérica de inteligencia artificial (IA) que permita determinar el procedimiento de arranque del volante de inercia que consuma menos energía
- Un expediente técnico con los detalles de los cálculos de modelización geométrica, cinemática y dinámica.
- Un expediente pedagógico con las actividades prácticas redactadas y corregidas.
- Un modelo volumétrico Solidworks directamente utilizable para simulaciones en Meca3D.
- Los esquemas cinemáticos parametrizados para una fácil explotación/adaptación de las actividades prácticas
S2I//1900: Estabilizador giroscópico para barcos