 Volver a la gama
Volver a la gama 




Robot háptico IO
SI/NSI/STI2D/CPGE/Univ
SI/NSI/STI2D/CPGE/Univ
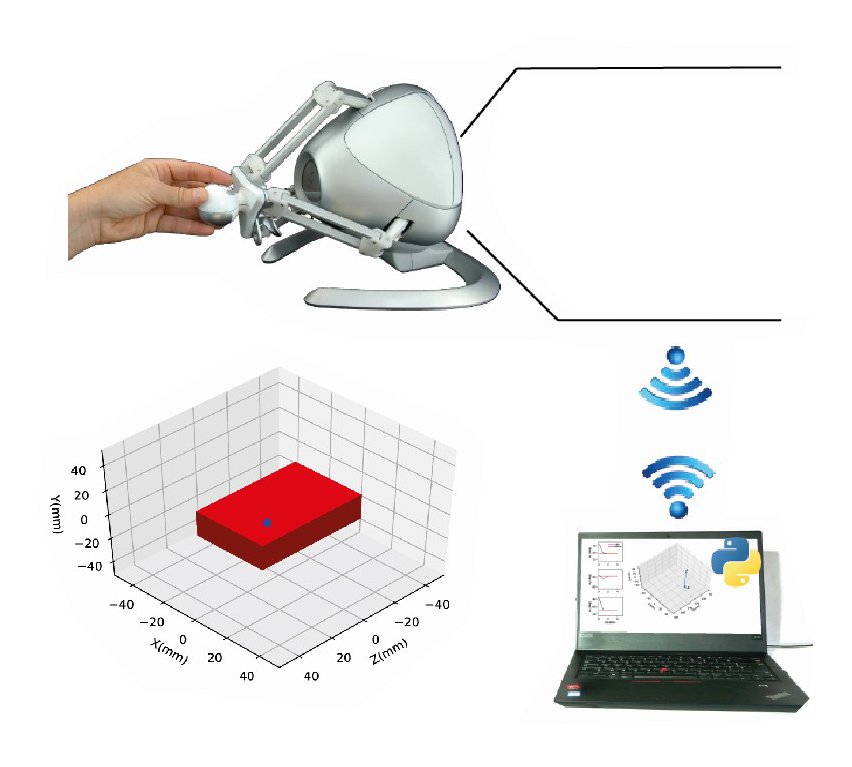
Soporte didáctico HIO para la implementación de una interfaz de realidad virtual.
El alumno es a la vez usuario y programador.
Programación Python, a distancia, a través del IDE Spyder: uso de bibliotecas de funciones Python (proporcionadas) para imponer el comportamiento de la interfaz.
La conexión se puede establecer en Python, según diferentes protocolos como el Protocolo de Internet o el protocolo BlueTooth.
La interfaz háptica se convierte en un objeto inteligente conectado.
Como usuario, el alumno puede validar el comportamiento y el rendimiento de la interfaz, y sentir físicamente el comportamiento virtual que ha implementado.
Interfaz hombre-máquina háptica autónoma y abierta: controlada por un microordenador (Raspberry Pi).
Impone el uso de algoritmos fundamentales en métodos numéricos y su interconexión mediante protocolos de red.
Interfaz háptica inteligente conectada:
Un soporte digital que incluye:
Algoritmia
Ingeniería digital y simulación
Soporte didáctico HIO para la implementación de una interfaz de realidad virtual.
El alumno es a la vez usuario y programador.
Interfaz hombre-máquina háptica autónoma y abierta: controlada por un microordenador (Raspberry Pi)
SHAP : Robot háptico
SHAP-CPGE: Conjunto de robot háptico para actividades CPGE
SHAPIO: Robot háptico con kit de desarrollo Python
SHAPARD: Opción: Robot háptico Proyecto con tarjeta ARDUINO.
SHAP-BM: Opción: Banco de instrumentación de robot háptico para aplicaciones CPGE (sin robot)
SHAPRS: Opción: Robot háptico no didáctico
 Robot Haptique HIO
Robot Haptique HIO