 Volver a la gama
Volver a la gama 




Robot Franka Emika Investigación y producción 3
El robot colaborativo de 7 ejes Franka Emika
Doc. commercial Eng
 Datasheet Robot Franka Emika Production 3
Datasheet Robot Franka Emika Production 3Doc. commercial Fr
Site Internet
 Franka Emika
Franka EmikaVidéo
Gamas asociadas :
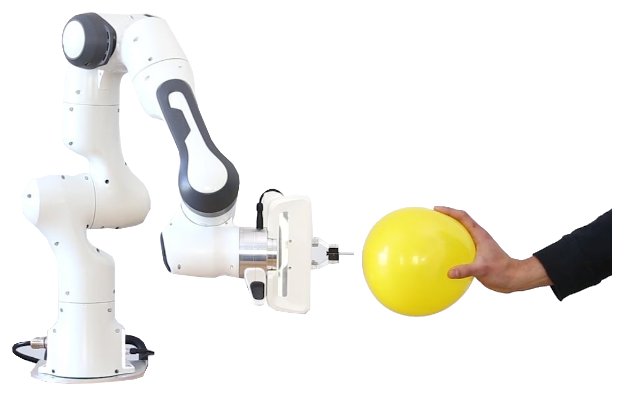
El robot colaborativo de 7 ejes Franka Emika
El robot de Franka Emika es ágil y sensible como un brazo humano, con sus 7 ejes, cada uno de los cuales incorpora un sensor de esfuerzo.
La programación, basada en flujos de trabajo, es intuitiva y la interacción es transparente.
El sistema presenta una interfaz usable basada en aplicaciones, que son programas de robot encapsulados. Organice las aplicaciones en una secuencia. A continuación, enseñe al robot mediante demostración y ajuste los parámetros.
El conjunto de programas dedicados a la investigación y al ámbito académico lo convierten en una herramienta única en el mercado.
Carga y geometría: radio de 855 mm, cobertura de volumen del 94,5 %, carga de 3 kg.
Movimiento: repetibilidad de +/-0,1 mm, desviación de trayectoria de +/-1,25 mm.
Sensibilidad de medición de esfuerzos: resolución < 0,05 N – precisión 0,8 N – repetibilidad < 0,05 N
Aplicación de esfuerzo: fuerza mínima controlable 0,05 N a 1 kHz
Interacción: Fuerza de guía 2 N – Tiempo de detección de colisión < 2 ms – Tiempo nominal de reacción ante una colisión < 50 ms
Codificadores de posicionamiento: Resolución de 14 bits – Posición absoluta – Redundancia en las conexiones
Conexiones electrónicas: Bus de comunicación 1 kHz – Altamente integrado
Motores brushless DC: Alta eficiencia – Sin mantenimiento durante toda su vida útil – Alta velocidad
Engranajes de onda de deformación: Engranajes de alta calidad (origen Alemania) – Excelente precisión de posicionamiento y repetibilidad
Rodamientos de rodillos cruzados: Robustos durante toda la vida útil del robot – Diseño ligero – Alta rigidez
Sensores de esfuerzo: Resolución de 13 bits – Excelente precisión – Alta sensibilidad
FR//Franka3Research-Std: Pack Franka 3 Research del robot colaborativo de 7 ejes Franka (radio 855 mm - carga 3 kg) con: robot de 7 ejes y su controlador - cable de alimentación tipo F de 2,5 m - Pinza colaborativa de 2 dedos - Interfaz de control Franka FCI3 - Interfaz de programación gráfica DESK - Paquete de aplicaciones Prototyping/Research - Entorno de desarrollo de aplicaciones RIDE
FR//Franka3Production-Std: Paquete Franka 3 Production del robot colaborativo de 7 ejes Franka (radio de 855 mm - carga de 3 kg) con: robot de 7 ejes y su controlador - cable de alimentación tipo F de 2,5 m - pinza colaborativa de 2 dedos - interfaz de programación gráfica DESK - paquete de aplicaciones Production - entorno de desarrollo de aplicaciones RIDE
FE02: Pinza de vacío Shmalz con generador de vacío para robot colaborativo de 7 ejes Panda de Franka con paquete de aplicaciones de pinza de vacío
FE03: Módulo remoto Modbus de 16E/16S para el robot Franka Panda (paquete Industria)
FE11: Opción Juego de dos escáneres láser para la gestión segura de las velocidades de desplazamiento, para la estación Cobot Franka
FE12: Opción Maletín de visión 2D monocromo Visor Robotic V10 (Marca: Sensopart) para robot colaborativo Franka
FE13: Opción maletín de visión 2D en color Visor Robotic V20 (marca: Sensopart), para el robot colaborativo Franka
RK11: Opción Piezas para proyectos de simulación de clipado y encolado robótico
RK12: Opción Piezas para proyectos de descarga de materiales a granel 2D y pick-and-place