 Volver a la gama "Estudios & Concepción Tecnológica"
Volver a la gama "Estudios & Concepción Tecnológica"
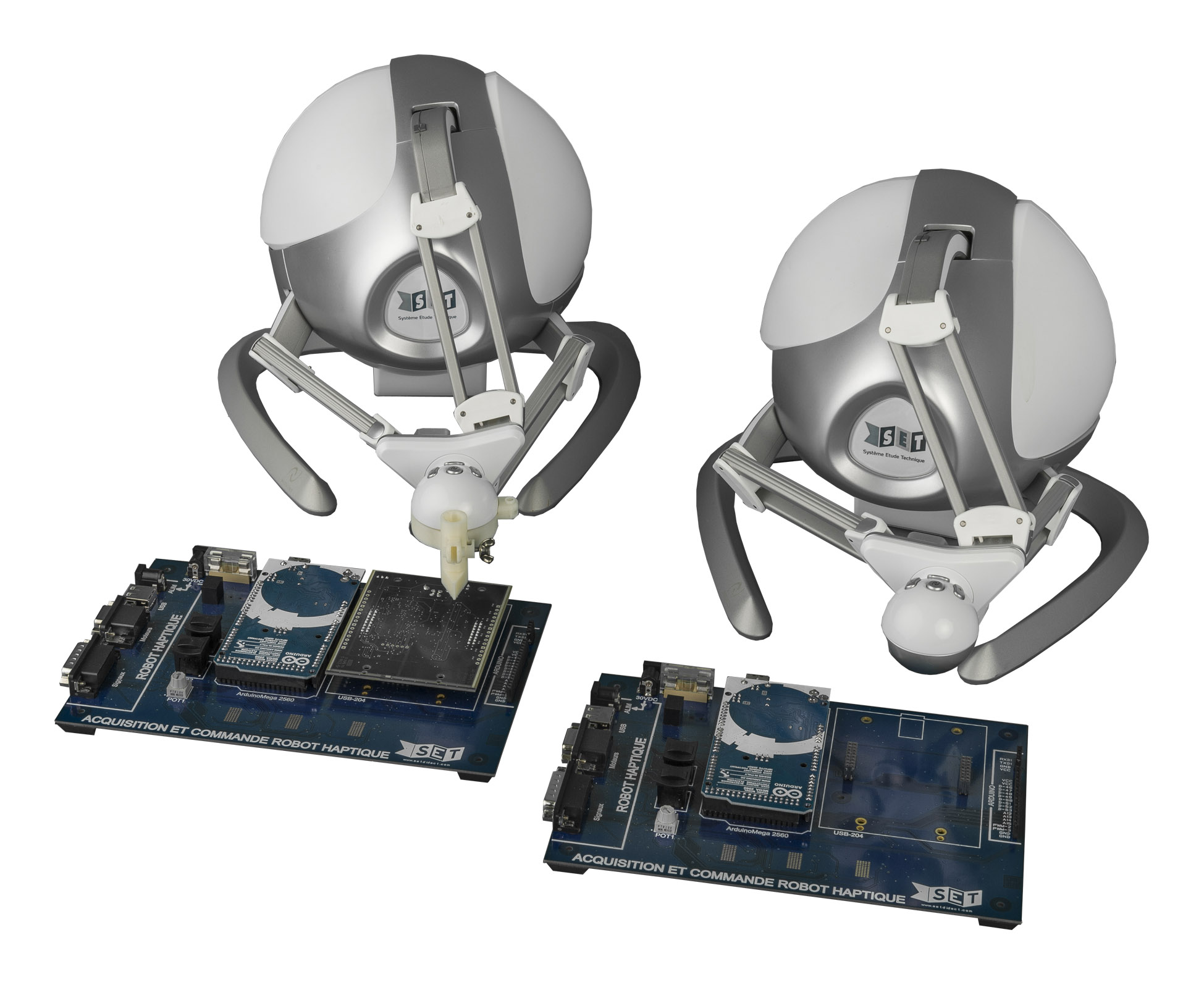






Robot háptico
SI/STI2D
SI/STI2D
Los robots hápticos provienen del campo científico del sentido del tacto. Se utilizan en el ámbito médico, en la telerrobótica en zonas de riesgo, en el mundo de los juegos con realidad virtual y en muchos otros campos.
El sistema didáctico integra dos robots hápticos, el primero con tarjeta de adquisición y mediciones integradas que permite trabajar con Matlab y Labview, y el segundo con una tarjeta Arduino para la programación.
Robot Delta de estructura paralela con 3 cadenas cinemáticas cerradas idénticas con 3 grados de libertad en traslación (espacio de trabajo 101 x 101 x 101 mm)
Motorreductores de corriente continua
Codificadores incrementales
Tarjeta de adquisición/medición integrada
Tarjeta Arduino in situ reprogramable
Los trabajos prácticos proporcionados permiten realizar actividades de análisis, modelización y experimentación con la medición de desviaciones.
Los campos de investigación cubiertos son:
Las solicitaciones, las deformaciones y las tensiones mecánicas
La reversibilidad de una cadena de transmisión
La cadena de energía con sus 3 motores
La cadena de información con sus tres codificadores incrementales y su conexión en serie con el PC
Los sistemas de control
Lo digital y la realidad virtual
Posibilidad de aplicaciones interdisciplinarias:
Matemáticas: funciones trigonométricas
Ciencias físicas y químicas: modelización de un sistema oscilante mecánico
Ciencias de la vida y de la Tierra: el cuerpo humano, las neuronas y las fibras musculares
Sistema real didáctico que permite caracterizar las diferencias entre lo deseado (datos del fabricante), el modelo y la realidad
Los robots hápticos didácticos pueden utilizarse en el marco de proyectos (SI, STI2D SIN e ITEC, NSI).
Expediente técnico con descripción SysML, modelización 3D en SolidWoks, modelo multifísico Matlab-Simulink
SHAP: Robot háptico
SHAP-CPGE: Conjunto de robot háptico para actividades CPGE
SHAPIO: Robot háptico con kit de desarrollo Python
SHAPARD: Opción: Robot háptico Proyecto con tarjeta ARDUINO.
SHAP-BM: Opción: Banco de instrumentación de robot háptico para aplicaciones CPGE (sin robot)
SHAPRS: Opción: Robot háptico no didáctico
 Robot Haptique
Robot Haptique