 Revenir dans la gamme "Technologies et sciences industrielles"
Revenir dans la gamme "Technologies et sciences industrielles"







Ball Balancing Table
Plateforme de contrôle d’équilibre à bille avec 2 degrés de liberté
Doc. commercial Fr
 Ball Balancing Table
Ball Balancing TableVidéo
 FR - Ball Balancing Table
FR - Ball Balancing TableGammes associées :
Plateforme de contrôle d’équilibre à bille avec 2 degrés de liberté
La Plateforme didactique « Ball Balancing Table » permet aux étudiants d’aborder les grands concepts des asservissements.
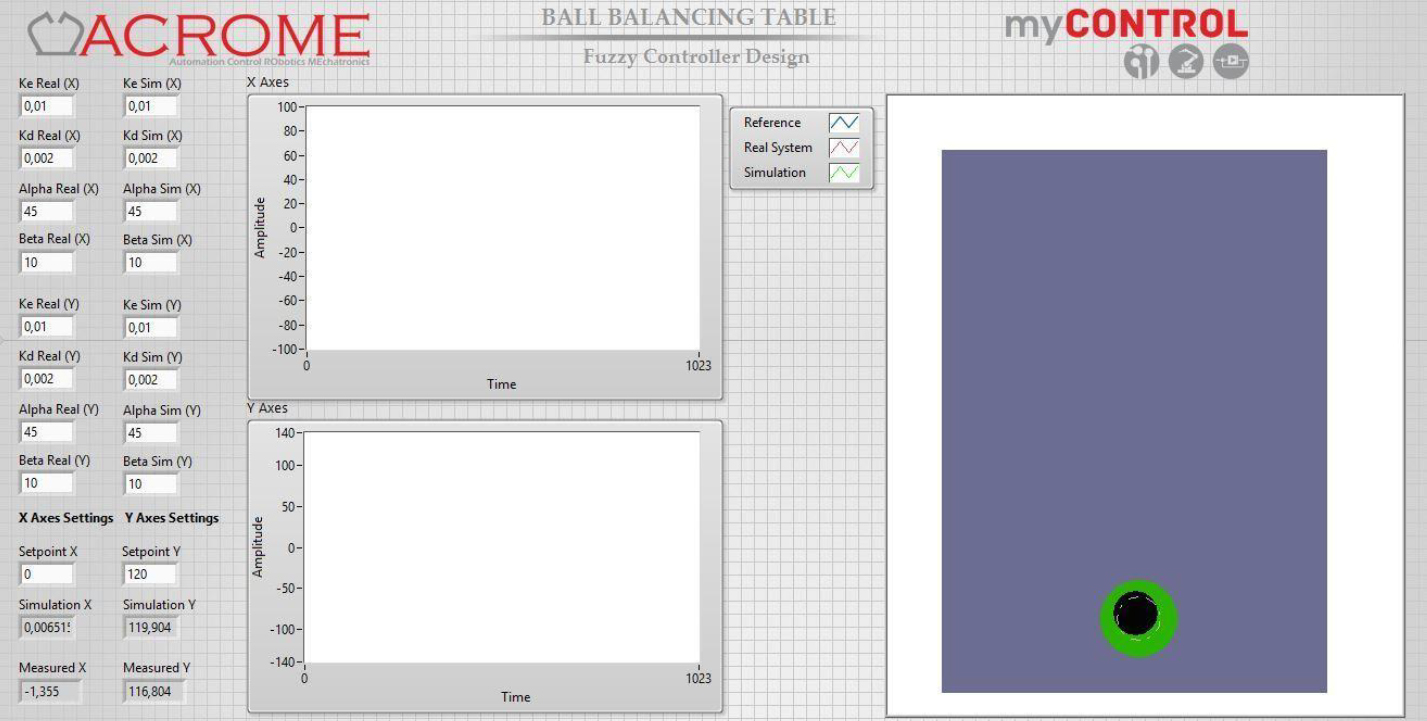
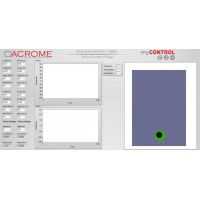
Elle est réalisée avec des composants faciles d’accès et conviviaux. Une bille est positionnée sur une table tactile. Elle est stabilisée par un mécanisme à deux degrés de liberté associé à un contrôle commande.
Les applicatifs Open Source permettent aux étudiants de créer, modifier et tester les propres algorithmes.
Table à deux degrés de liberté monté sur un cardan central
Deux servomoteurs analogiques 4,8V et couple 0,5 Nm
Deux mécanismes Bielle / Manivelle avec rotules couplés aux deux servomoteurs et à la table
Une table tactile 17 pouces résistive à 4 fils avec quadrillage vertical et horizontal
Une carte électronique d’interface entre la partie opérative et les cartes de commandes (myRIO, Arduino et Raspberry)
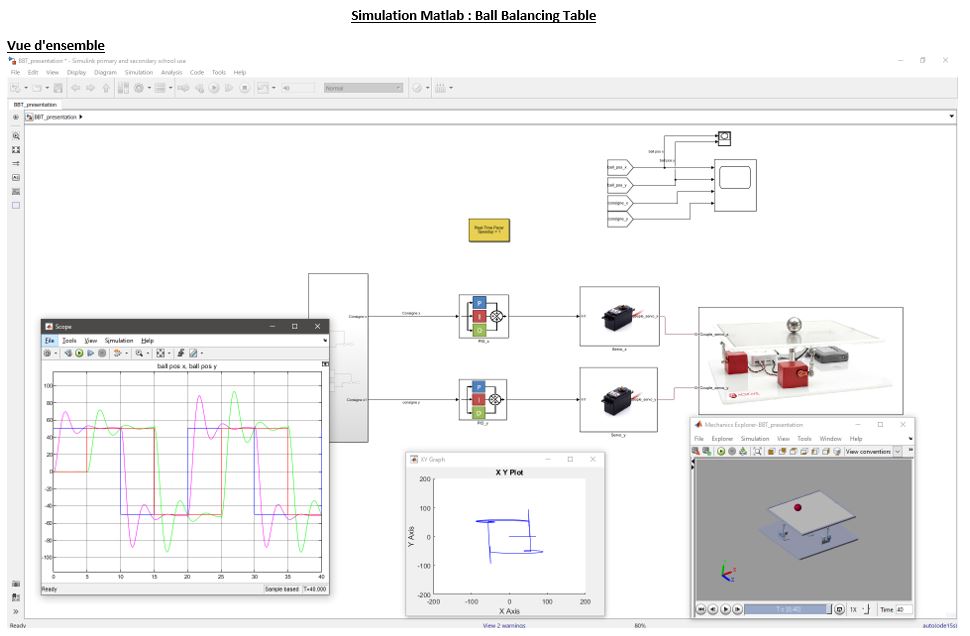
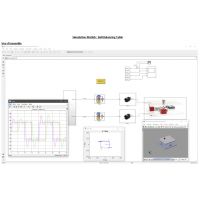
Entièrement compatible avec LabVIEW et MATLAB Simulink
Structure logiciel Open Source pour personnaliser les applications souhaitées
Les compléments de trajectoires rectangulaires et circulaires sont intégrés dans le logiciel
La technologie 5G constitue une technologie révolutionnaire, jusqu'à 100 fois plus rapide que la 4G, avec des temps de latence très courts et une haute fiabilité.
La latence désigne le temps nécessaire à un paquet de données pour passer de la source à la destination, à travers un réseau informatique.
En 4G, la latence est d'environ 20 ms, elle est 10 fois plus petite en 5G
La Ball Balancing Table a été créée à la demande d'INTEL pour évaluer en utilisation "temps réels" les performances d'un réseau 5G
Le test consiste à faire parcourir un labyrinthe par une bille le plus rapidement possible avec une commande via un réseau 5G
Etude fonctionnelle et structurelle de la plateforme "Ball Balancing Table" :
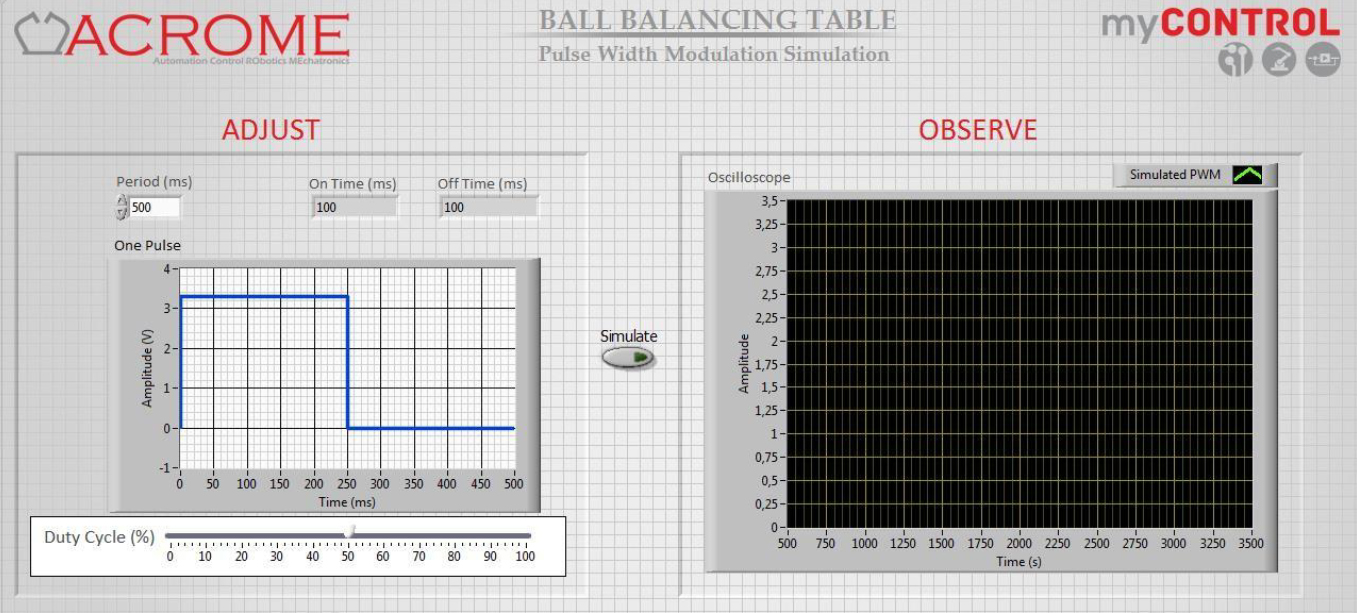
Etude de la modulation de largeur d'impulsion (PWM) :
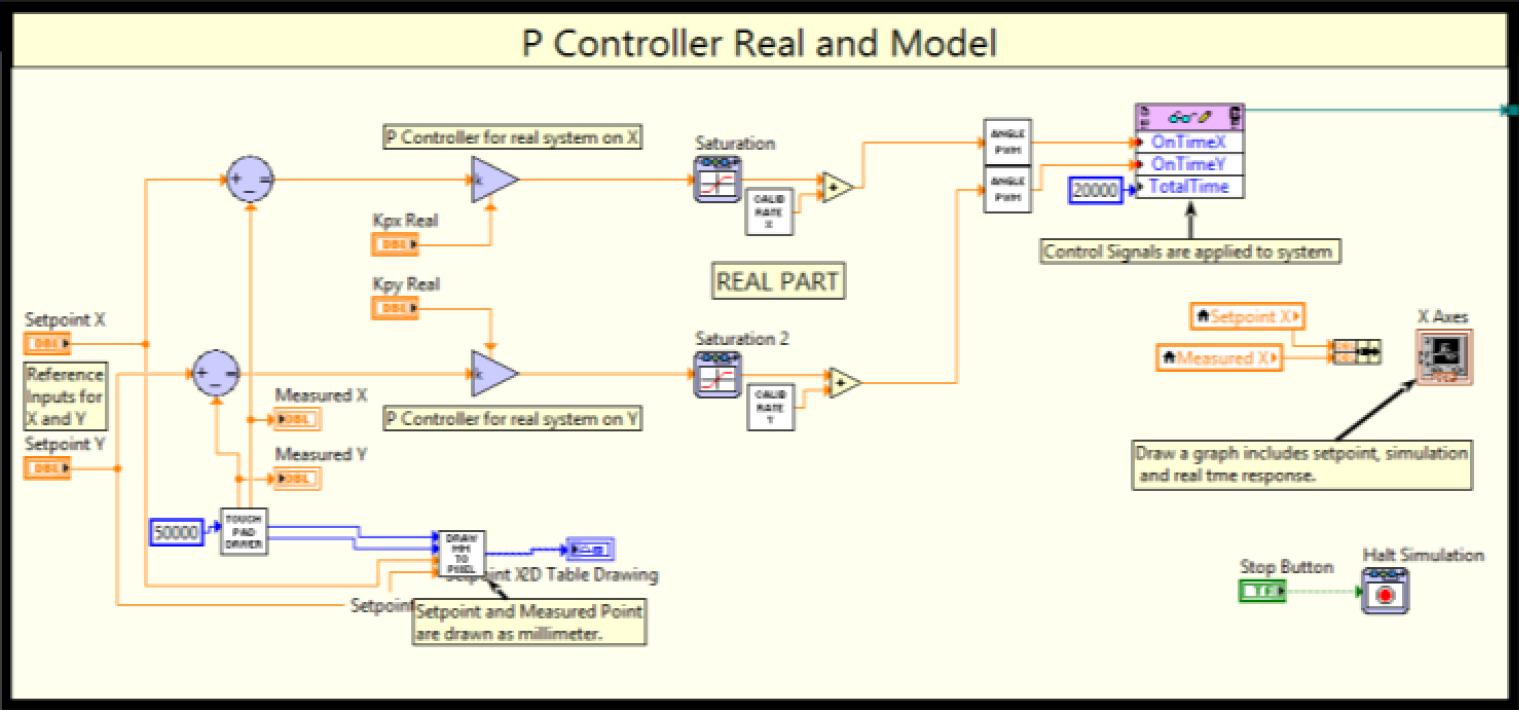
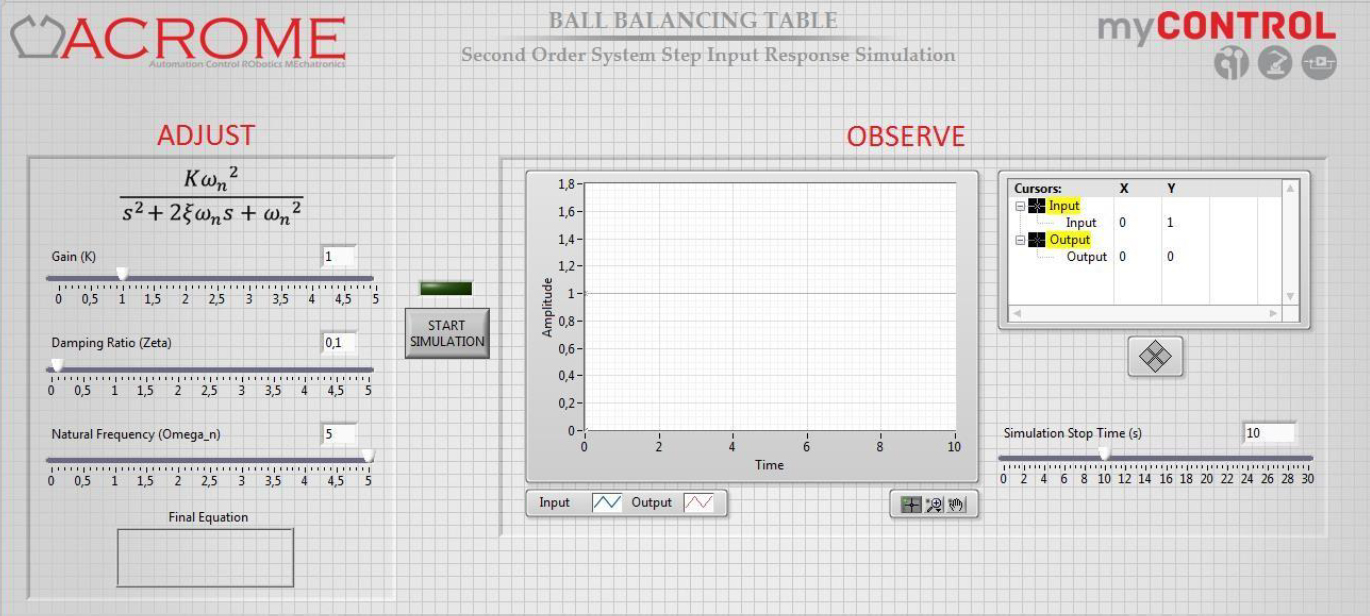
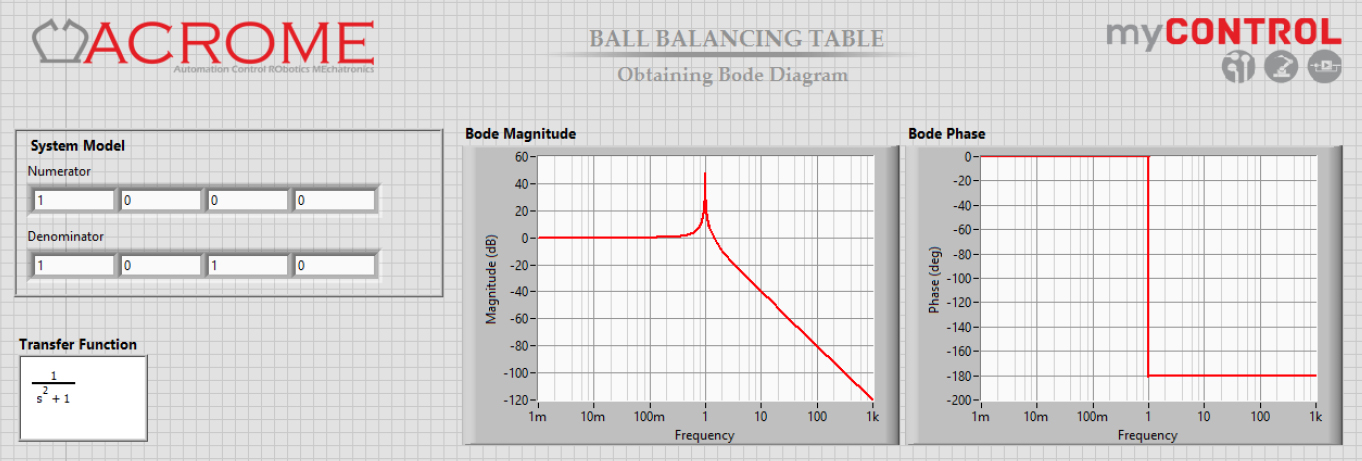
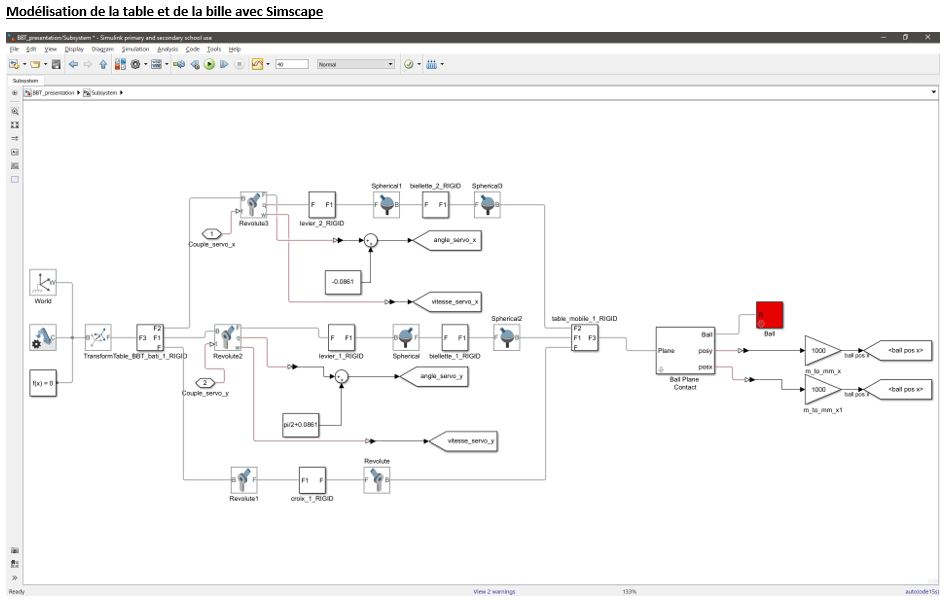
Modélisation du système :
Etude de la boucle de retour dans les systèmes :
Mesure des performances :
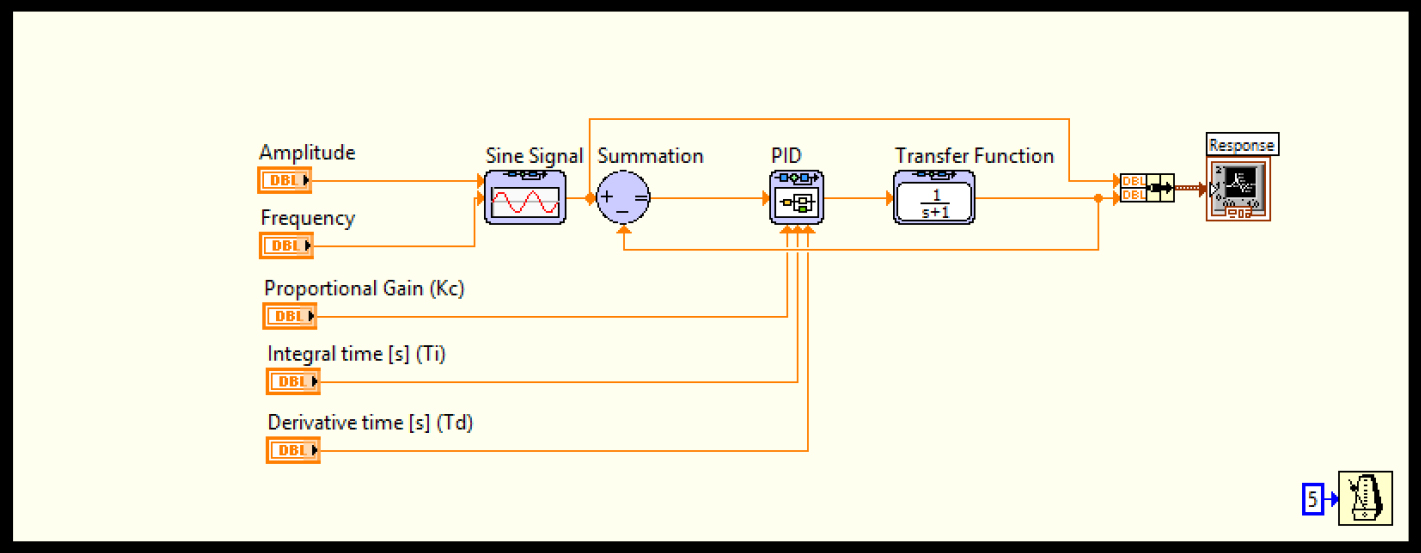
Conception des correcteurs d'asservissement :
Vérification des systèmes de contrôles :
TP découverte :
TP initialisation :
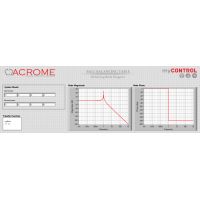
TP Performances : Identification temporelle (fonction point)
Réponse entrée échelon en X puis en Y
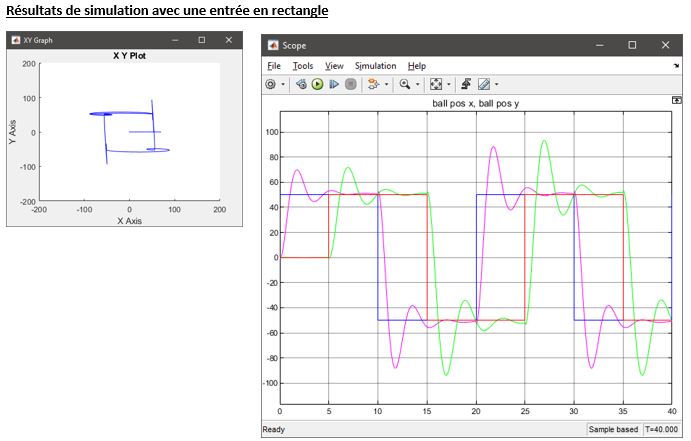
TP Performances : Identification temporelle (fonction rectangle)
Réponse Entrée échelon en X et en Y combinées
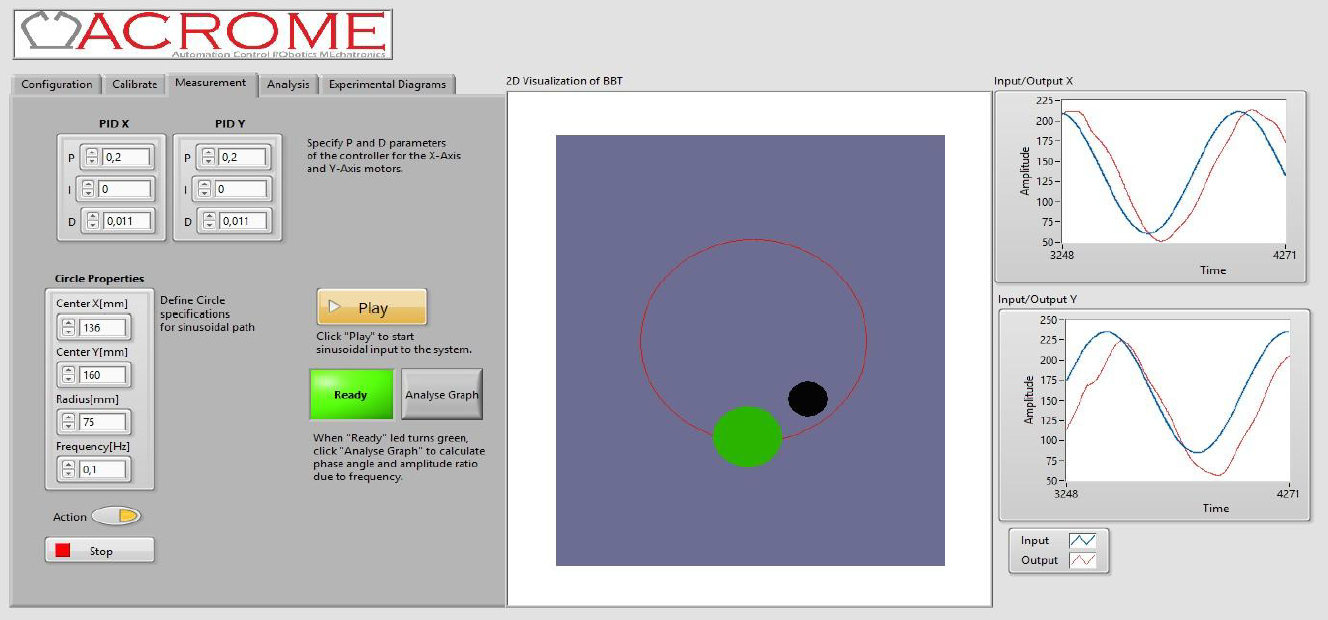
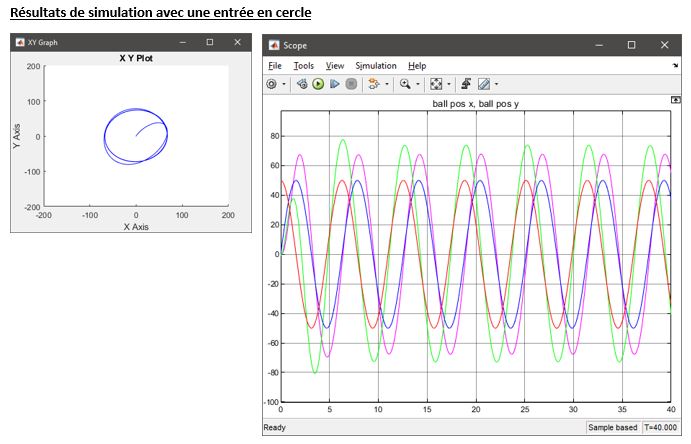
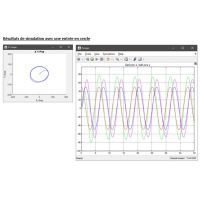
TP Performances : Identification temporelle (fonction cercle)
Analyse et préparation étude fréquentielle
TP Performances : Identification fréquentielle (tracé de bode en boucle fermée)
Fonction « étude fréquentielle un seul axe »
TP Performances : Identification fréquentielle (tracé de bode en boucle fermée)
Fonction cercle
TP Performances : Identification fréquentielle (tracé de bode en boucle ouverte)
Identification et stabilité
TP Performances Réglage PID : Optimisation du correcteur PID
TP Etude transmission mouvement (fonction cercle)
Lois géométriques transmission mouvement moteur - table
TP Etude transmission mouvement (fonction cercle)
Lois géométriques table-bille
TP Etude transmission mouvement (fonction cercle)
Loi moteur-bille
Cette liste de travaux pratiques est susceptible d'évoluer.
Table didactisé « Ball Balancing Table » permettant d’appréhender les grands fondements des asservissements.
Partie commande au choix des utilisateurs avec programmation sous LabVIEW, MATLAB Simulink, Python.
Programmes Open source permettant de réaliser ces propres interfaces de commande
Mise en œuvre des techniques de contrôle / commande numérique avancées
AO03 : Ball Balacing Table, sans contrôle commande
AO01 : Contrôle commande avec MyRIO
AO02 : Contrôle commande avec Arduino Mega
AC//RPi3 : Contrôle commande avec Raspberry Pi 3