 Volver a la gama
Volver a la gama 







Mesa de equilibrio de bolas
Plataforma de control de equilibrio con bolas con 2 grados de libertad
Doc. commercial Fr
 Ball Balancing Table
Ball Balancing TableVidéo
 FR - Ball Balancing Table
FR - Ball Balancing TableGamas asociadas :
Plataforma de control de equilibrio con bolas con 2 grados de libertad
La plataforma didáctica «Ball Balancing Table» permite a los estudiantes abordar los grandes conceptos de los sistemas de control.
Está fabricada con componentes fáciles de acceder y manejar. Se coloca una bola sobre una mesa táctil. Se estabiliza mediante un mecanismo de dos grados de libertad asociado a un control de mando.
Las aplicaciones de código abierto permiten a los estudiantes crear, modificar y probar sus propios algoritmos.
Mesa con dos grados de libertad montada sobre un cardán central
Dos servomotores analógicos de 4,8 V y par de 0,5 Nm
Dos mecanismos de biela/manivela con rótulas acopladas a los dos servomotores y a la mesa
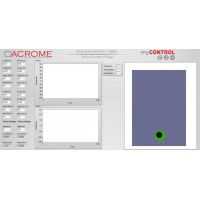
Una mesa táctil de 17 pulgadas resistiva de 4 hilos con cuadrícula vertical y horizontal
Una tarjeta electrónica de interfaz entre la parte operativa y las tarjetas de control (myRIO, Arduino y Raspberry).
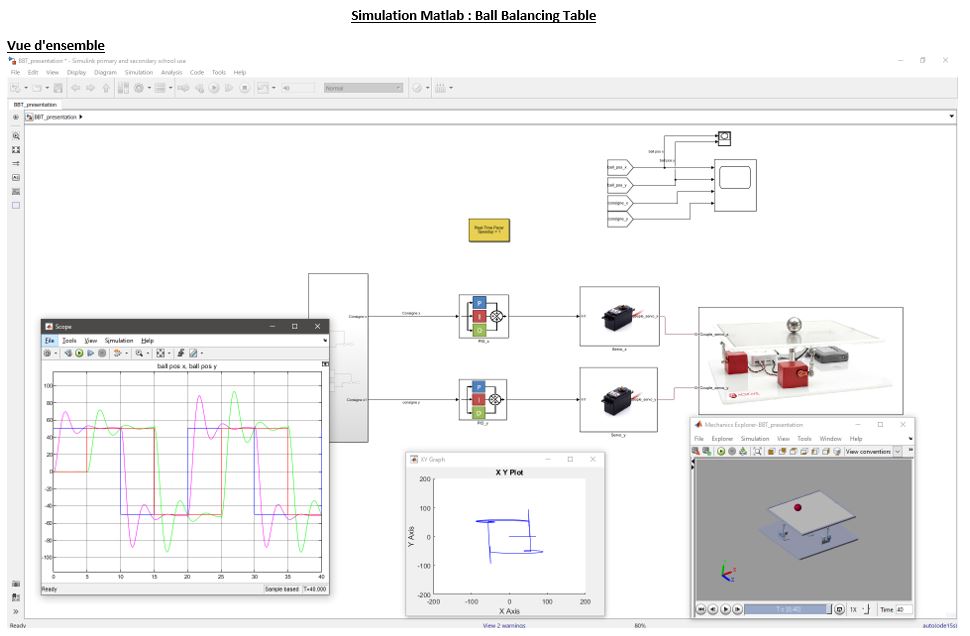
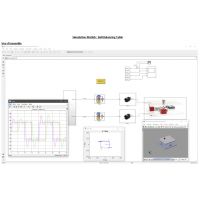
Totalmente compatible con LabVIEW y MATLAB Simulink.
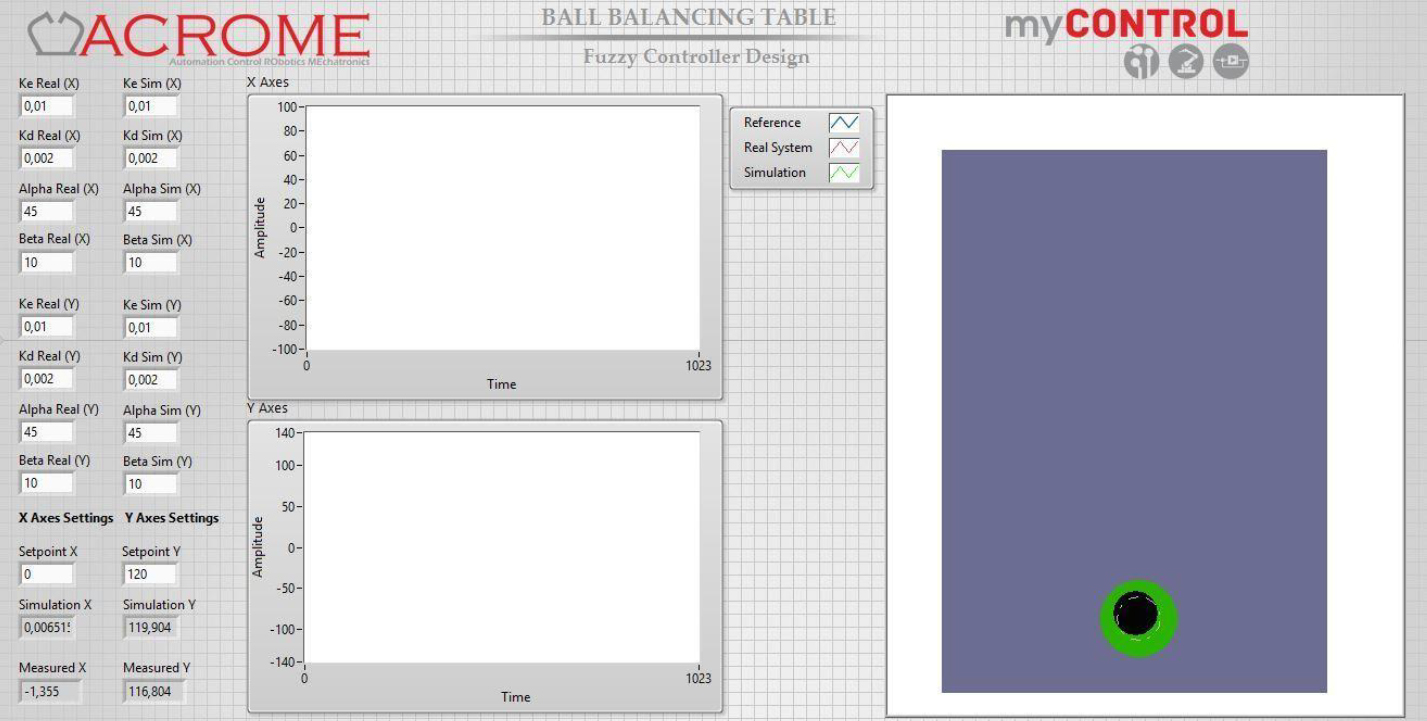
Estructura de software Open Source para personalizar las aplicaciones deseadas
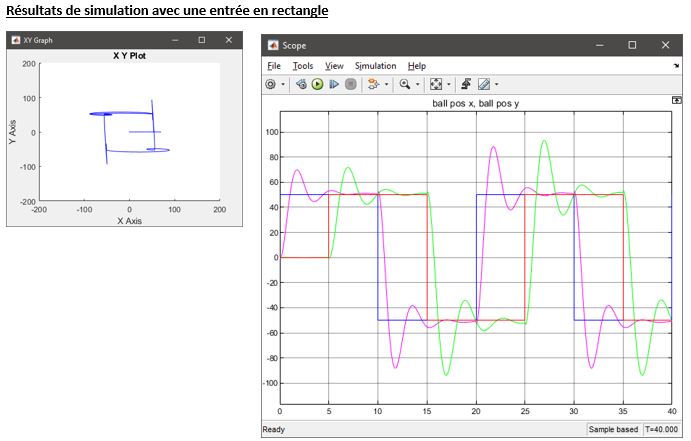
Los complementos de trayectorias rectangulares y circulares están integrados en el software
La tecnología 5G es una tecnología revolucionaria, hasta 100 veces más rápida que la 4G, con tiempos de latencia muy cortos y una alta fiabilidad.
La latencia es el tiempo que tarda un paquete de datos en pasar de la fuente al destino a través de una red informática.
En 4G, la latencia es de unos 20 ms, mientras que en 5G es 10 veces menor.
La Ball Balancing Table se creó a petición de INTEL para evaluar en «tiempo real» el rendimiento de una red 5G.
La prueba consiste en hacer que una bola recorra un laberinto lo más rápido posible mediante un control a través de una red 5G.
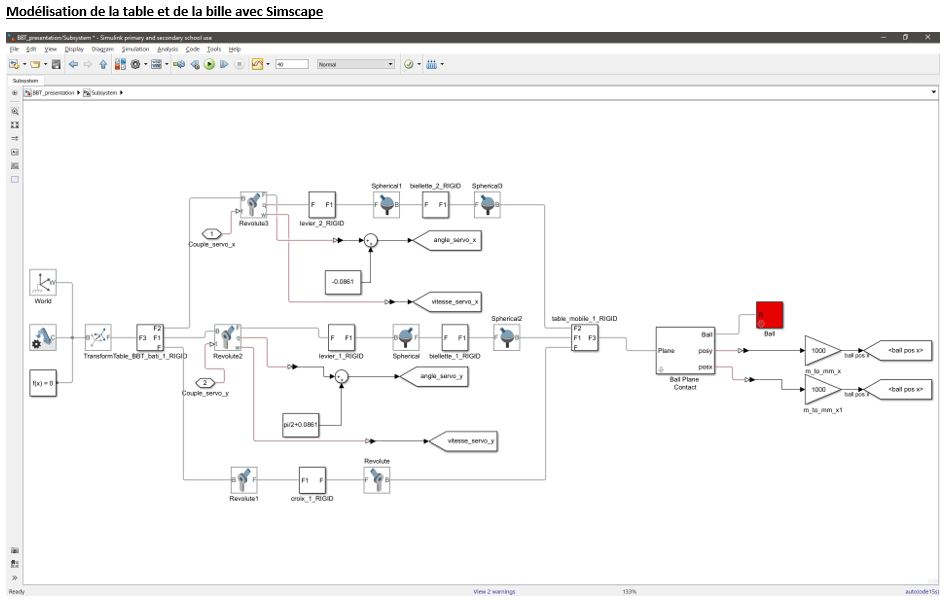
Estudio funcional y estructural de la plataforma «Ball Balancing Table»:
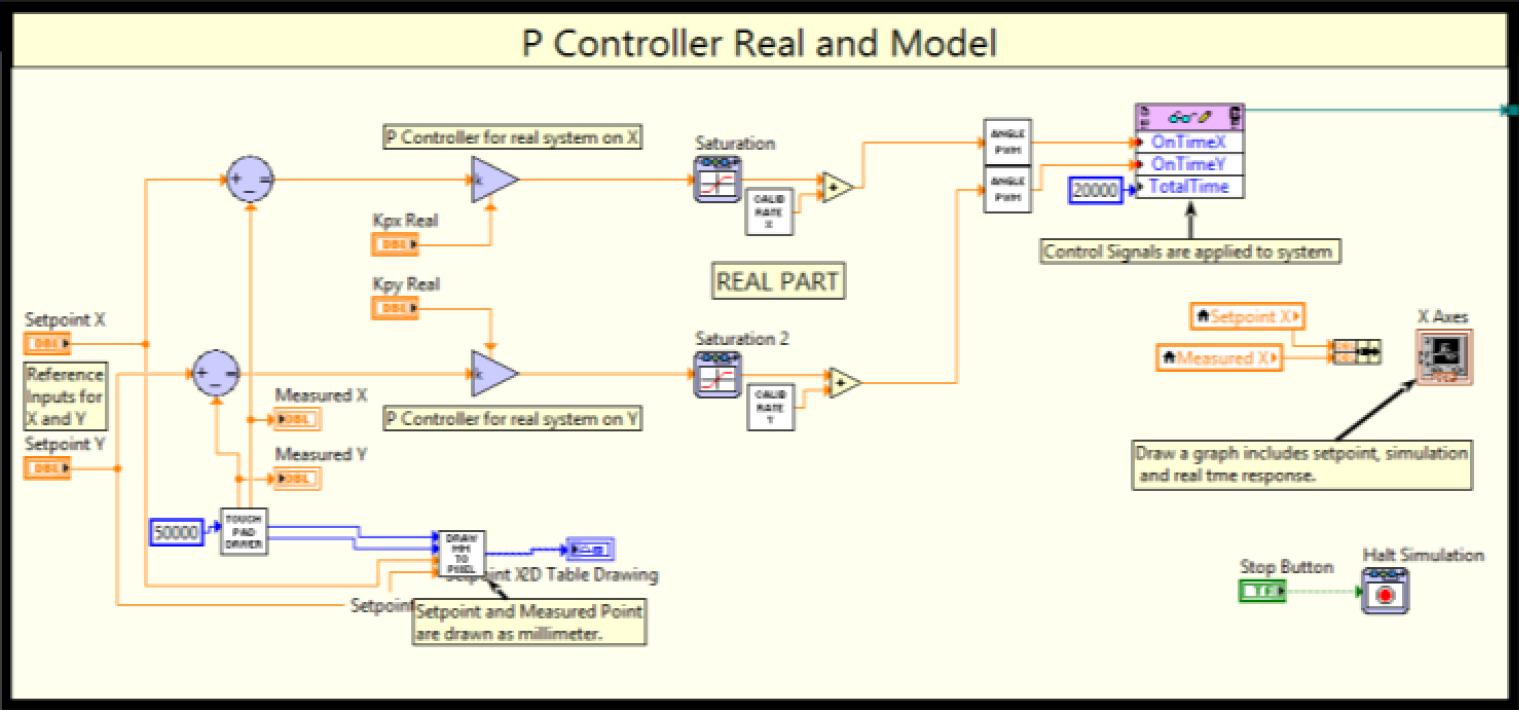
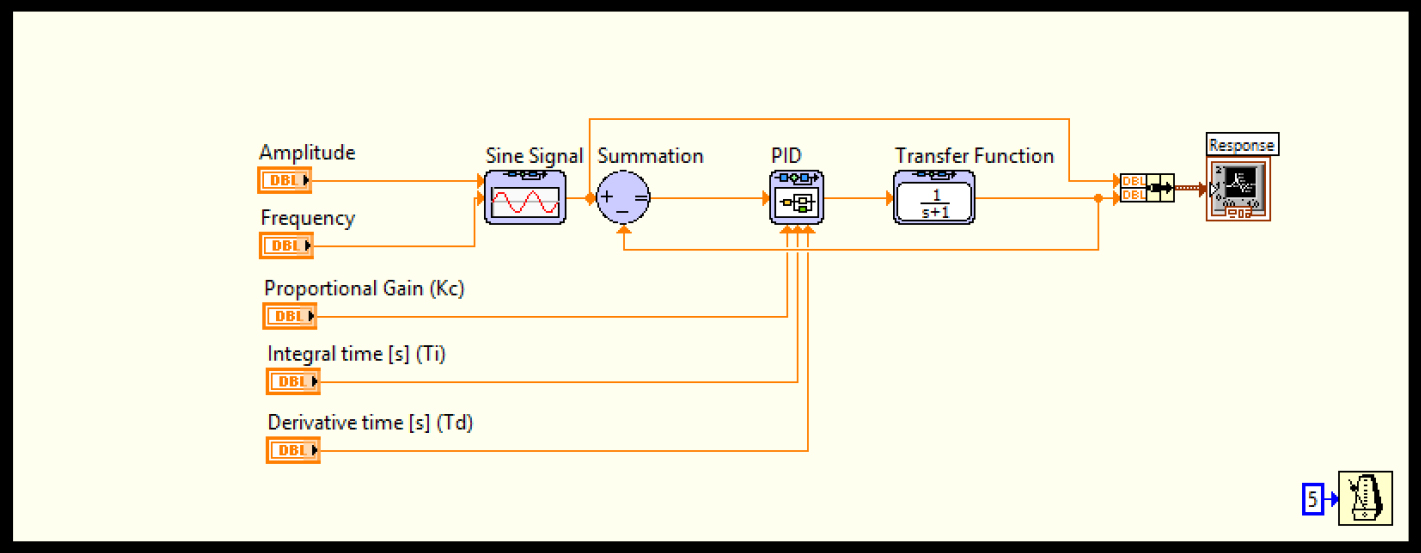
Modelización del sistema: Estudio del bucle de retroalimentación en los sistemas: Medición del rendimiento: Diseño de correctores de servocontrol: TP descubrimiento: TP de inicialización: TP Rendimiento: Identificación temporal (función punto) TP Rendimiento: Identificación temporal (función rectángulo) TP Rendimientos: Identificación temporal (función círculo) TP Rendimiento: Identificación frecuencial (trazado de Bode en bucle cerrado) TP Rendimiento: Identificación frecuencial (diagrama de Bode en bucle cerrado) TP Rendimiento: Identificación frecuencial (trazado de Bode en bucle abierto) TP Rendimiento Ajuste PID: Optimización del corrector PID TP Estudio de la transmisión del movimiento (función circular) TP Estudio de la transmisión del movimiento (función circular) TP Estudio de la transmisión del movimiento (función circular) Esta lista de trabajos prácticos está sujeta a cambios. Mesa didáctica «Ball Balancing Table» que permite comprender los fundamentos básicos de los sistemas de control. Parte de control a elección de los usuarios con programación en LabVIEW, MATLAB Simulink y Python. Programas de código abierto que permiten crear interfaces de control propias Implementación de técnicas avanzadas de control/mando digital AO03: Ball Balancing Table, sin control de mando AO01: Control con MyRIO AO02: Control con Arduino Mega AC//RPi3: Control con Raspberry Pi 3
Actividades pedagógicas SSI / CPGE:
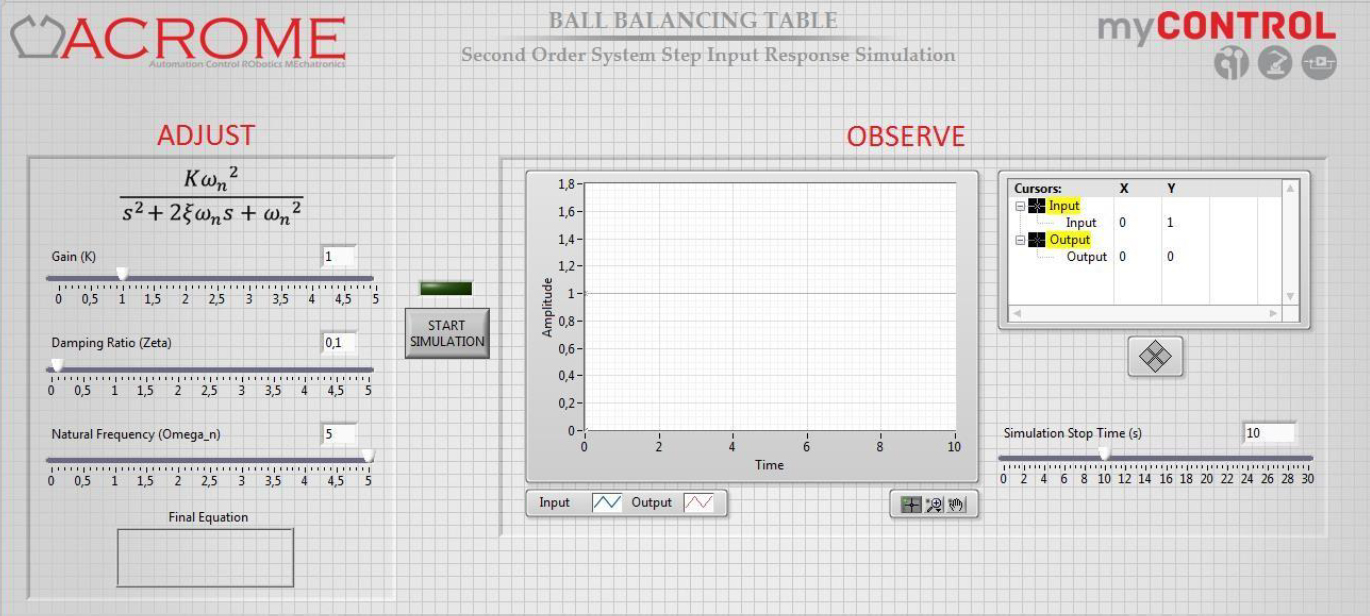
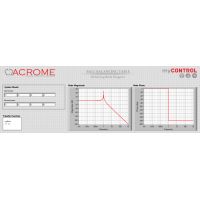
Respuesta de entrada escalonada en X y luego en Y
Respuesta Entrada escalonada en X e Y combinadas
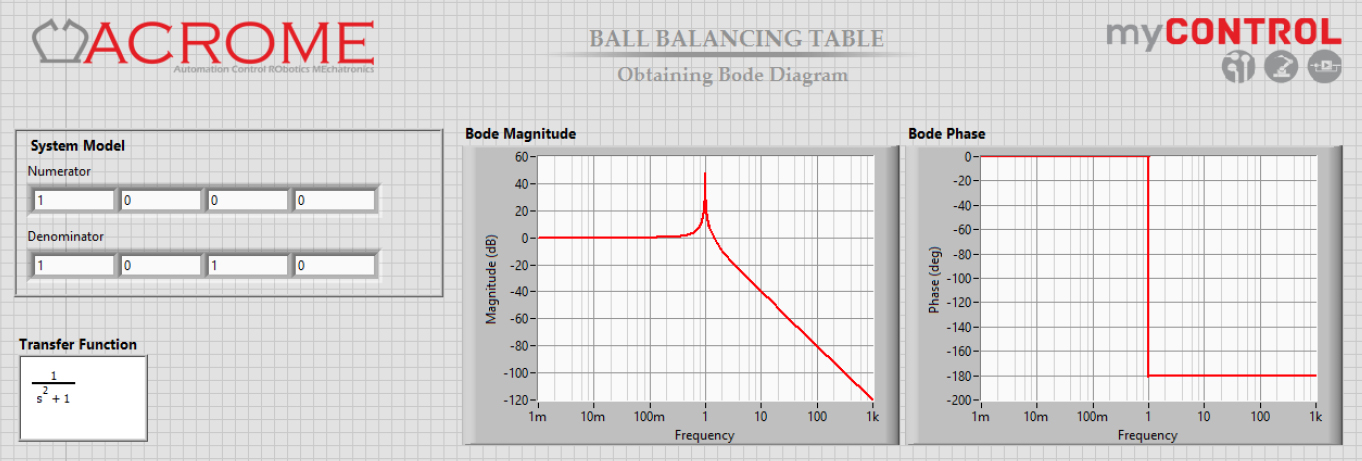
Análisis y preparación del estudio de frecuencia
Función «estudio frecuencial de un solo eje»
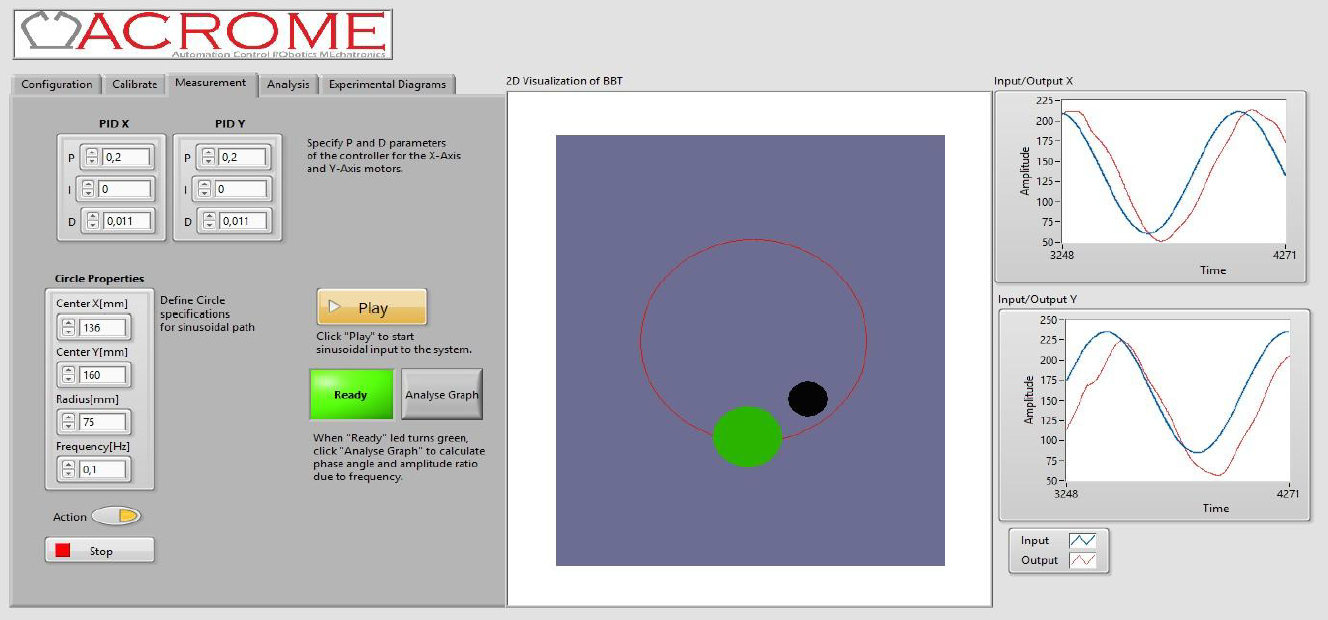
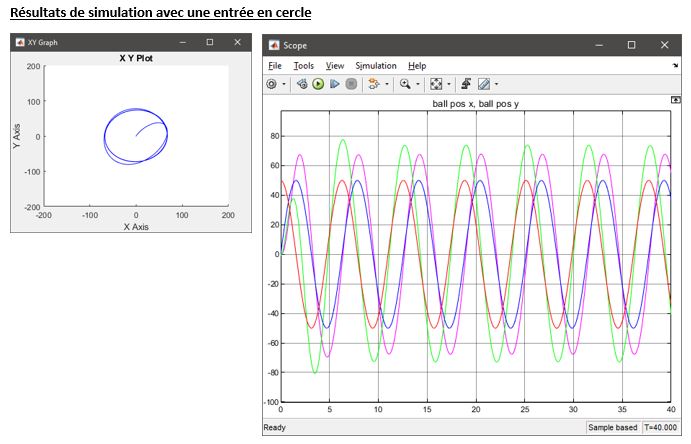
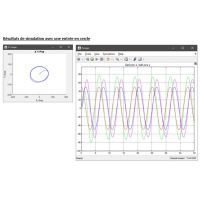
Función circular
Identificación y estabilidad
Leyes geométricas de la transmisión del movimiento del motor - tabla
Leyes geométricas mesa-bola
Ley motor-bola
Puntos claves:
Referencias:
Vídeo: