 Revenir dans la gamme "Technologies et sciences industrielles"
Revenir dans la gamme "Technologies et sciences industrielles"



Robot DELTA
Robot parallèle à 3 parallélogrammes
 Robot DELTA
Robot DELTA Robot DELTA
Robot DELTAGammes associées :
Robot parallèle à 3 parallélogrammes
Les robots DELTA sont des éléments essentiels des lignes de production automatisées en raison de leur vitesse de déplacement élevée et de leur précision de positionnement. Ils sont parfaitement adaptés aux opérations « Pick & Place ».
Le Robot DELTA est un système didactique permettant d’aborder les grands fondements de la robotique tels que la cinématique directe et inverse, la génération de trajectoires, la planification de mouvement et la programmation robotique.
Robot DELTA à 3 barres rigides
Trois servomoteurs numériques (RS232)
Trois mécanismes Bielle / Manivelle avec rotules
Actionneur magnétique pour les applications « Pick & Place »
Caméra numérique pour la vision
Carte électronique d’interface entre la partie opérative et les cartes de commandes (myRIO, Arduino et Raspberry)
Entièrement compatible avec LabVIEW et MATLAB Simulink
Structure logiciel Open Source pour personnaliser les applications souhaitées
Etude fonctionnelle et structurelle du robot DELTA :
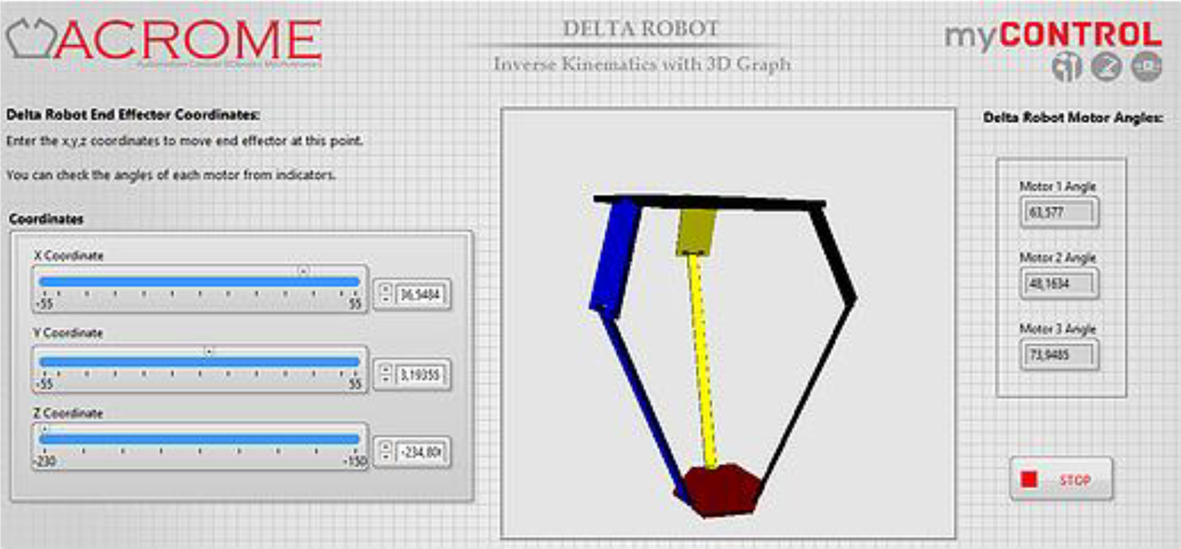
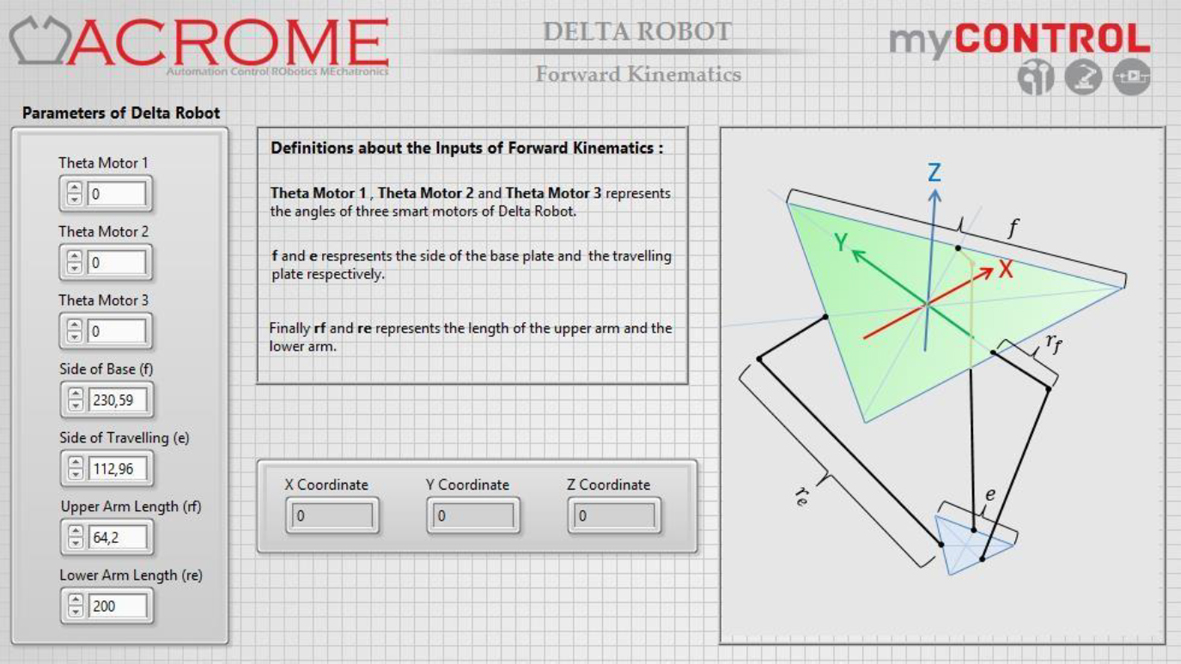
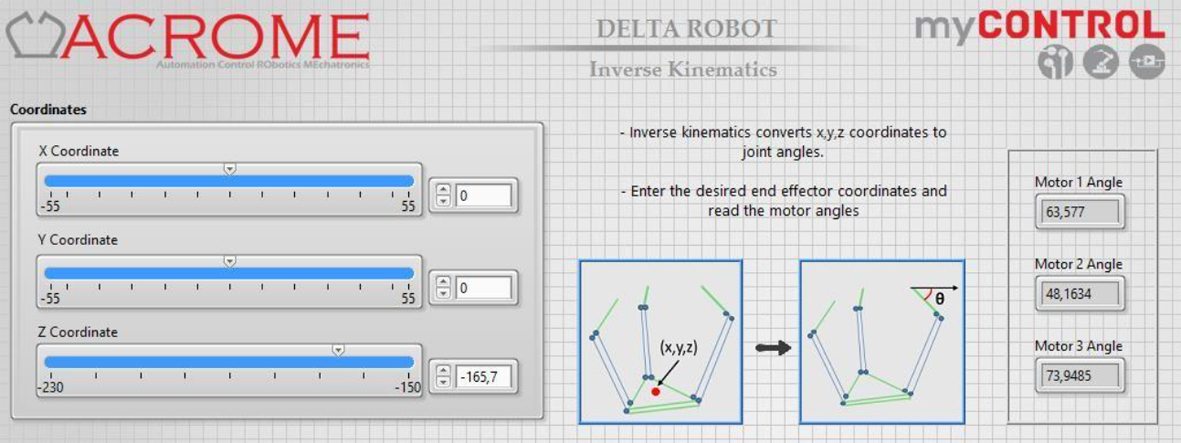
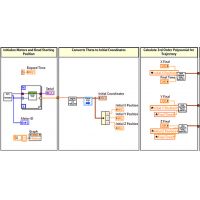
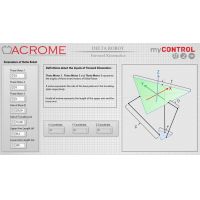
Etude des modèles cinématiques du robot :
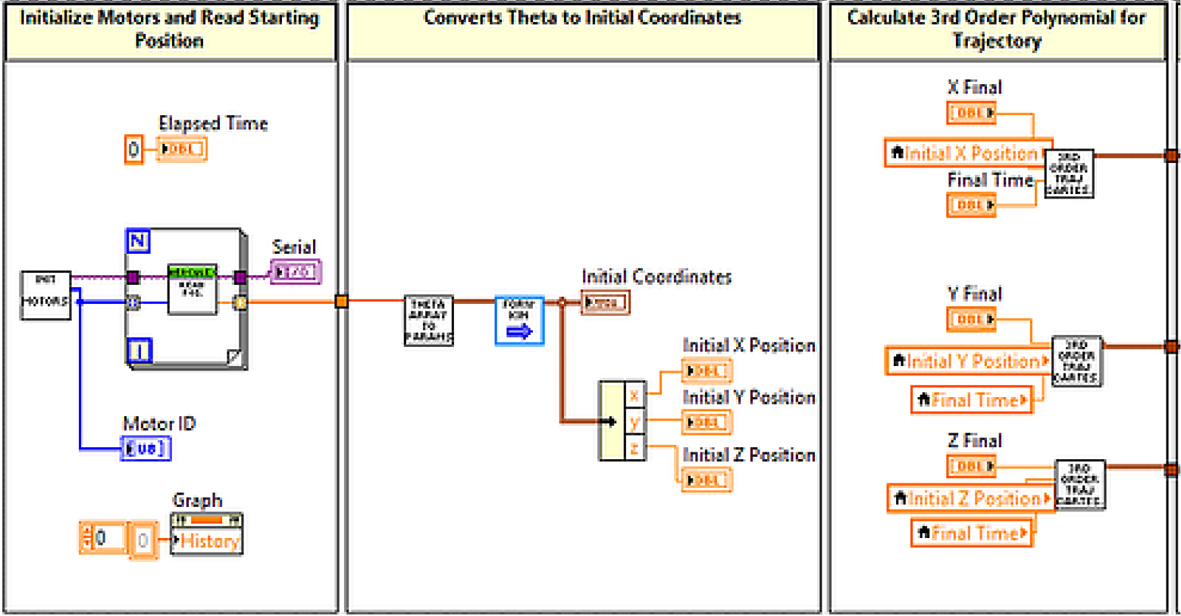
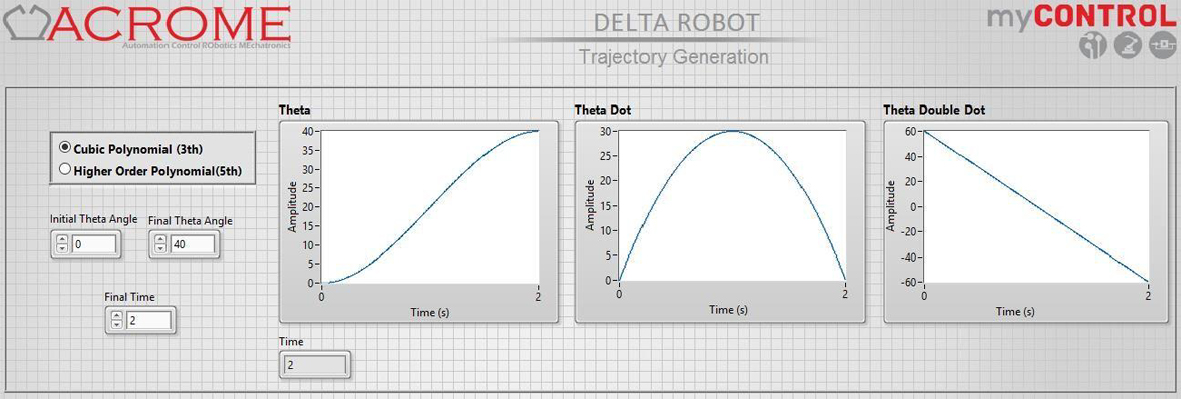
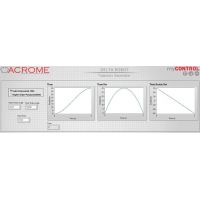
Etude des trajectoires du robot :
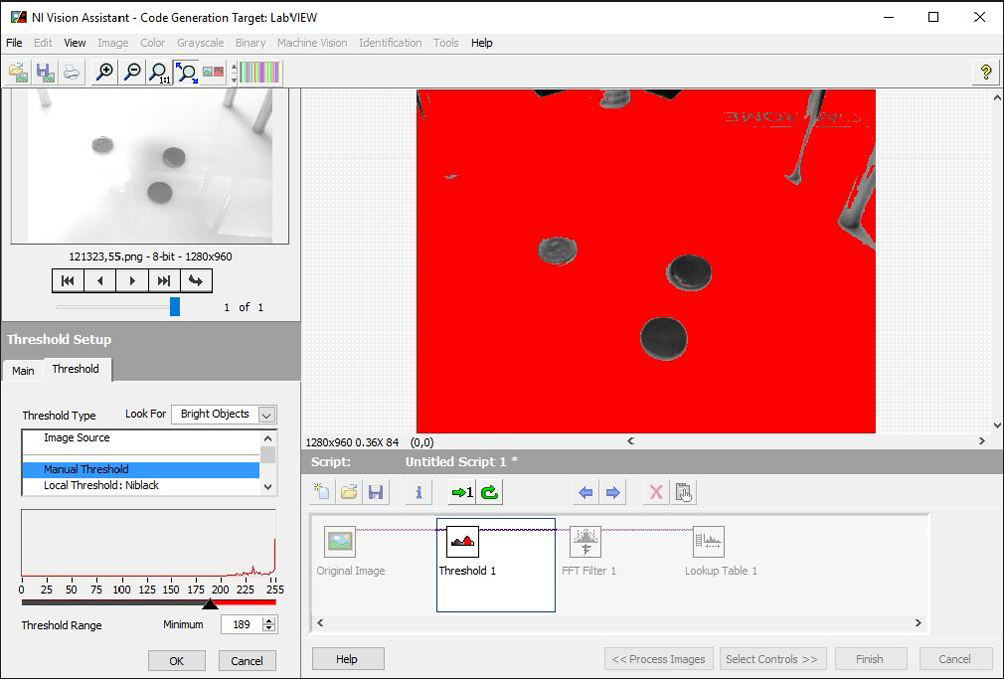
Etude de l’acquisition et du traitement des images :
Robot DELTA didactisé permettant d’appréhender les grands fondements de la robotique
Partie commande au choix des utilisateurs avec programmation sous LabVIEW, MATLAB Simulink, Python.
Programmes Open source permettant de réaliser ces propres interfaces de commande.
AO04 : Robot DELTA
AO01 : Contrôle commande avec MyRIO
AO02 : Contrôle commande avec Arduino Mega
AC/RPi3 : Contrôle commande avec Raspberry Pi 3