 Revenir dans la gamme
Revenir dans la gamme 


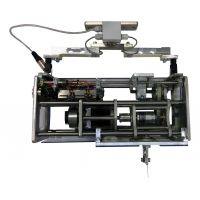




Robot à câbles d'assistance au levage et positionnement 2D/3D
Etudes et projets autour d’un robot à câbles
Etudes et projets autour d’un robot à câbles
Les robots à câbles présentent l'avantage de limiter les masses en mouvement (et donc l'inertie) et d'autoriser des déplacements sur des grandes distances.
L'application la plus connue à ce jour; est le système de déplacement de caméras sur les stades (ex: Skycam).
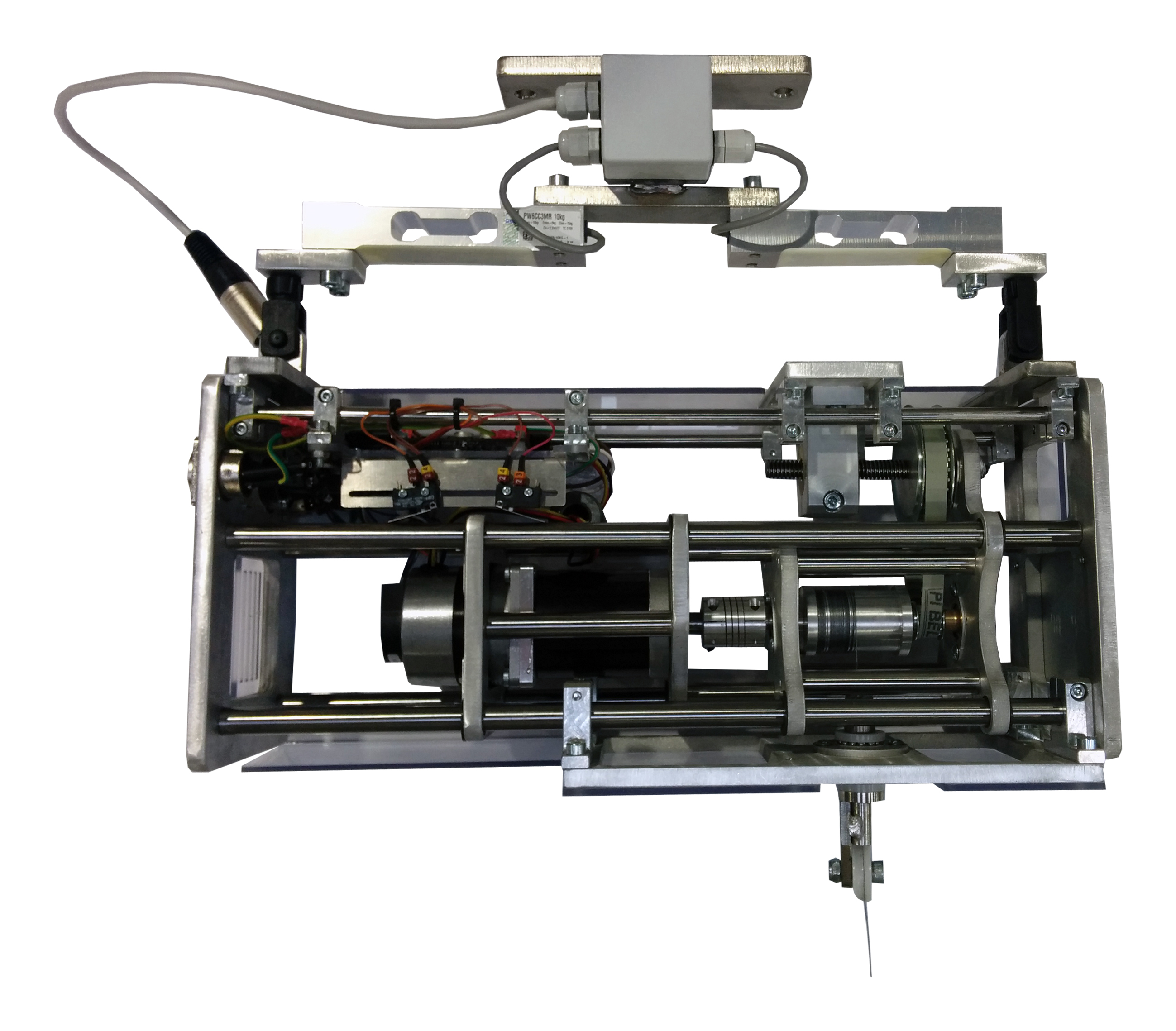
Le robot à câbles didactique est composé d'un châssis avec 1, 2 ou 4 têtes d'enroulage permettant de réaliser permet de réaliser des activités pédagogiques liées à la conception mécanique, électronique et logicielle mais également sur l'analyse et la commande de systèmes asservis.
Asservissement en position, vitesse et effort
Motorisation & Energie (Moteurs brushless, Carte industrielle de contrôle moteur)
Mesure des efforts et couples
Solutions mécaniques de trancannage (Enroulement ordonné du câble)
Carte à microcontrôleur Mbed
Communication USB et CANopen
Activités disponibles :
Analyse fonctionnelle SysML d’un système de contrôle de trajectoire d’une caméra
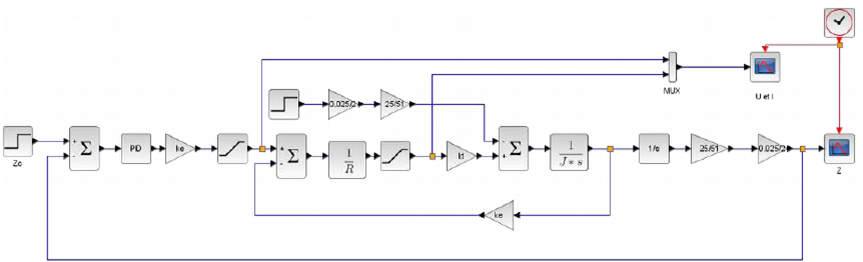
Modélisation de l'asservissement en position d'un treuil (modèle Scilab/Xcos)
Analyse et modélisation de l'asservissement en position d'un treuil (identification expérimentale)
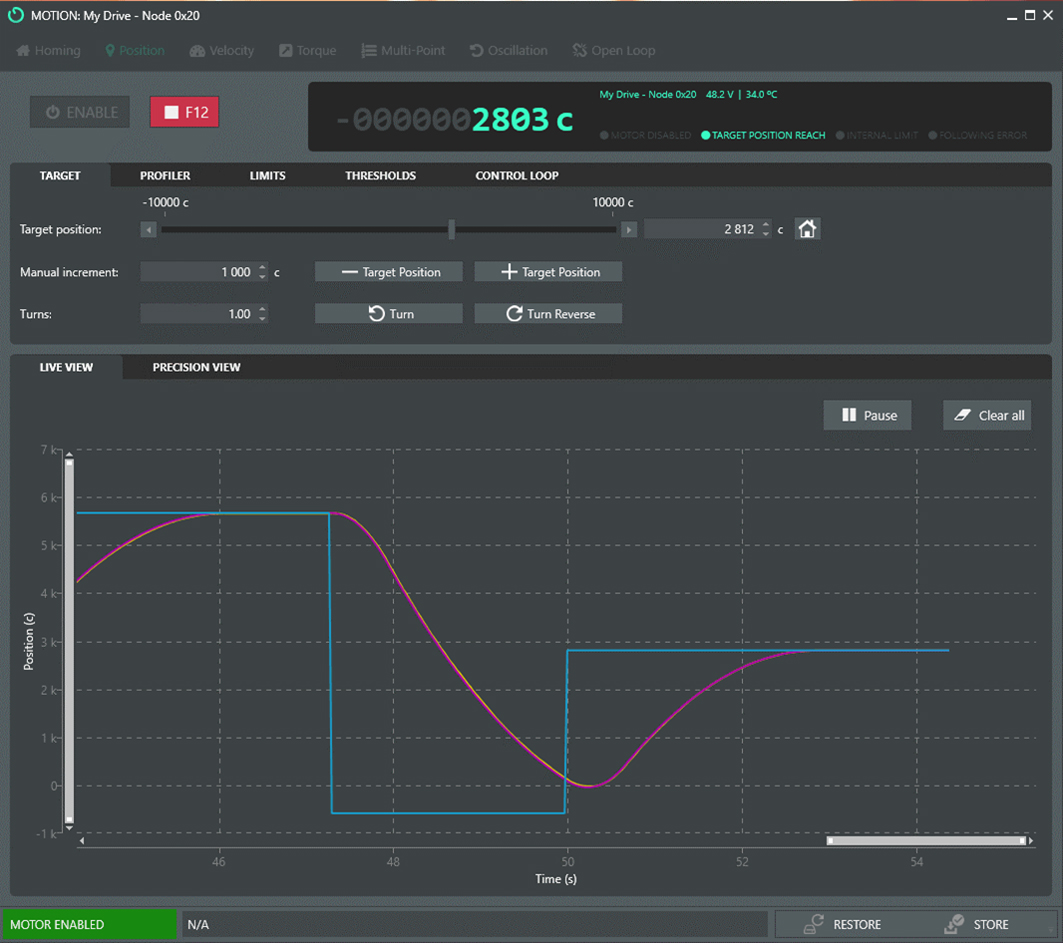
Analyse et optimisation des paramètres de correction de l'asservissement en position d'un treuil
Optimisation expérimentale des paramètres d’asservissement via le « wizard » de MotionLab « Auto-tune »
Programmation Python et C avec API « Ingenialink »
Activités possibles :
Statique (détermination de la direction de traction du câble à partir des deux capteurs d'efforts)
Conception (dessin de définition d’une plaque support moteur)
Graphe d'états (commande en effort avec auto-calibration pour l’assistance au levage d’une masse variable)
Etude du fonctionnement des moteurs brushless (courbes de commande de phases) et comparaison avec les moteurs CC
Etude des capteurs (capteurs à effet hall, codeur incrémental relatif optique, capteur d'effort par jauge d’extensométrie, capteur TOR de fin de course)
Génération et optimisation de trajectoires 1D, 2D de la nacelle compatible avec la motorisation
Projet: Développement des asservissements pour les solutions à 1 tête (Assistance au levage) ou 2 têtes d’enroulage (Positionnement 2D)
Projet: Conception d’une nacelle
Evolutivité : scénarios à plusieurs têtes d’enroulage, avec la même commande
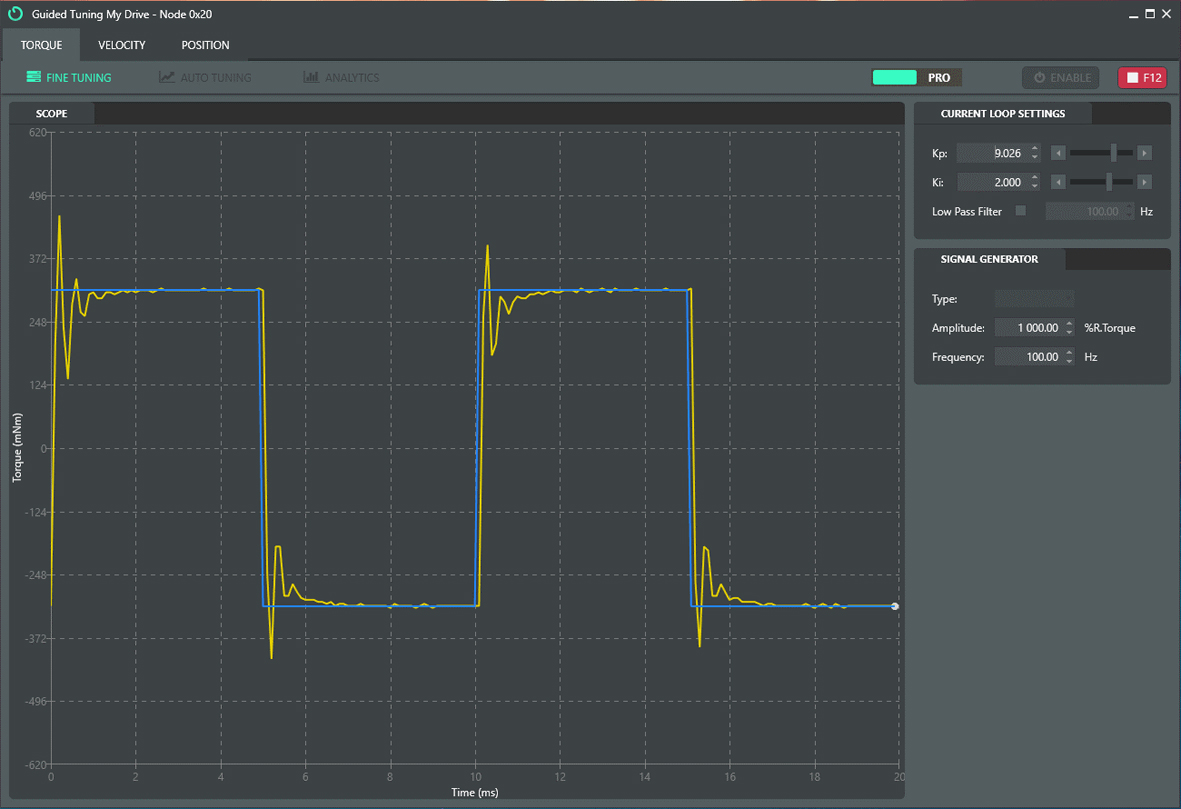
Contrôle de la commande en boucle fermée totalement ouvert et configurable : position, vitesse et couple
Richesse de la mécanique des têtes d’enroulage (Trancannage)
Logiciel MotionLab du constructeur Ingenia Motor Systems interface de la configuration de la carte de contrôle avec oscilloscope sur de nombreuses données. Logiciel développé en partenariat avec l’université de Barcelone
Mise à jour gratuites et régulières du logiciel MotionLab et des « firmwares » de la carte de commande (corrections des bugs et améliorations)
WR10 + WR11 : Robot à câbles d’assistance au levage avec une tête d’enroulage brushless
WR10 + WR11 + WR11 : Robot à câbles de positionnement 2D avec deux têtes d’enroulage brushless
WR10 + WR10 + WR11 + WR11 + WR11 + WR11 : Robot à câbles de positionnement 3D avec quatre têtes d’enroulage brushless rétro-compatibles en système à 2 enrouleurs
 Robot à câbles
Robot à câbles