 Volver a la gama "Electrónica & Comunicaciones"
Volver a la gama "Electrónica & Comunicaciones"




Robot Humanoide NAO
Doc. commercial Fr
 Documentation Robot humanoïde Nao
Documentation Robot humanoïde NaoPédagogie
Vidéo
 Nao joue au foot
Nao joue au footInformation supplémentaires
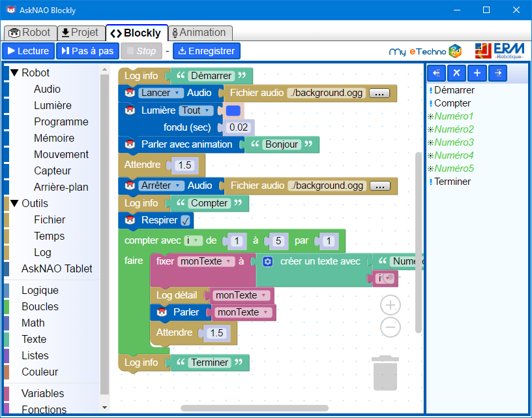
 Communication de NAO avec des applications externes Démarrrer avec la version 2.1
Communication de NAO avec des applications externes Démarrrer avec la version 2.1Gamas asociadas :
Communication de NAO avec des applications externes Démarrrer avec la version 2.1Hasta 25 grados de libertad
Audio (4 micrófonos y 2 parlantes)
Video (2 cámaras KVGA)
Central inercial (Acelerómetro 3-ejes y Girómetro 2-ejes) y Sonares
Sensores (De presión FSR para el equilibrio, Mecánicos para detectar los choques, Táctiles para sentir el contacto)
Servo-motores (25 motores coreless asociados con sensores de efecto Hall/)
Prensión (con los dedos)
CPU 500MHz para pensar e interactuar (Texto-a-voz, Reconocimiento de imagen, Reconocimiento de voz …)
Módulos WiFi y Ethernet
Batería de Litio-polímero
Historia y evolución de la robótica, Aplicaciones actuales y futuras
Características técnicas de NAO, Análisis funcional y mapa heurístico, Estudio de las patentes
Estudio de la arquitectura cinemática, electrónica y software
Estudio de los materiales y procesos (Cubiertas de NAO)
Estudio de las localizaciones audio y espacial, de los movimientos de los órganos, de la prensión, del equilibrado, de los medios de comunicación
Estudio de la ergonomía y del diseño
Estudio de los controles puestos en práctica en NAO
Estudio de los algoritmos de localización (sonares) y de mapeo (cabeza láser)
Estudio de la utilización de los 8 sensores de presión FSR en el equilibrado de NAO
Desarrollo y test de nuevos algoritmos (ej. Visión, Equilibrio…) en el seno de la comunidad NAO
Proyecto: Definición de aplicaciones para NAO, inventar misiones para NAO
Proyecto: Creación de arquitectura de programas para las actividades (ej. NAO controla una pieza)
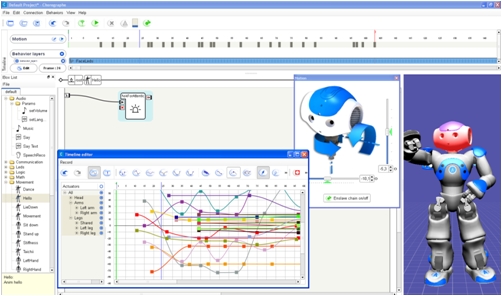
Proyecto: Creación de comportamientos con el software Coreógrafo o complejas con el SDK
Proyecto: Crear un vehículo para NAO (Utilización del Kit carretilla móvil con comunicación Bluetooth)
Soporte lúdico para los estudiantes y vector de comunicación para el establecimiento
Entorno abierto (Suite software de programación y adquisición de datos...)
4 tipos de robots para todos los presupuestos y todos les proyectos
AR//H25: Robot humanoide NAO H25 con SDK, Coreógrafo, Monitor, NAOSim AR//H21: Robot humanoide NAO H21 con SDK, Coreógrafo, Monitor, NAOSim
AR//T14: Robot humanoide NAO T14 con SDK, Coreógrafo, Monitor
AR//T2: Robot humanoide NAO T2 con SDK, Coreógrafo, Monitor
NA10: Set de accesorios para actividades (pesos, sensores ultrasonidos, router wifi, telemando IR…)
NA11: Modulo de estudio de control pie + tobillo
NA12: Conjunto mecánico “palma de la mano” y “pie+tobillo”
AR//LaserHead: Cabeza láser para mapeo
AR//NAOSW-10: Suite Software NAO 10 licencias (SDK, Coreógrafo, Monitor, NAOSim