 Return to the range
Return to the range 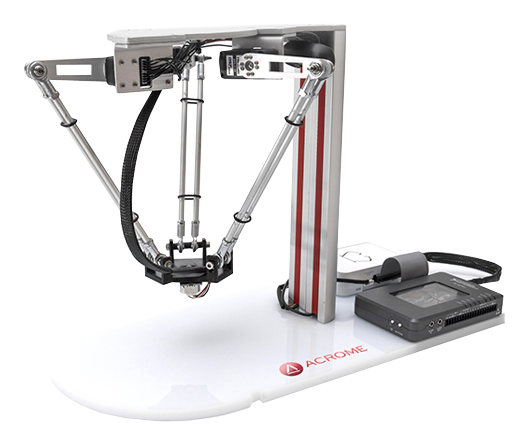



DELTA robot
Parallel robot with 3 parallelograms
 Robot DELTA
Robot DELTA Robot DELTA
Robot DELTARelated ranges :
Parallel robot with 3 parallelograms
DELTA robots are essential components of automated production lines due to their high speed of movement and positioning accuracy. They are perfectly suited to pick-and-place operations.
The DELTA Robot is an educational system that introduces the fundamentals of robotics, such as direct and inverse kinematics, trajectory generation, motion planning, and robotic programming.
DELTA robot with 3 rigid bars
Three digital servomotors (RS232)
Three connecting rod/crank mechanisms with ball joints
Magnetic actuator for pick & place applications
Digital camera for vision
Electronic interface card between the operating part and the control cards (myRIO, Arduino and Raspberry)
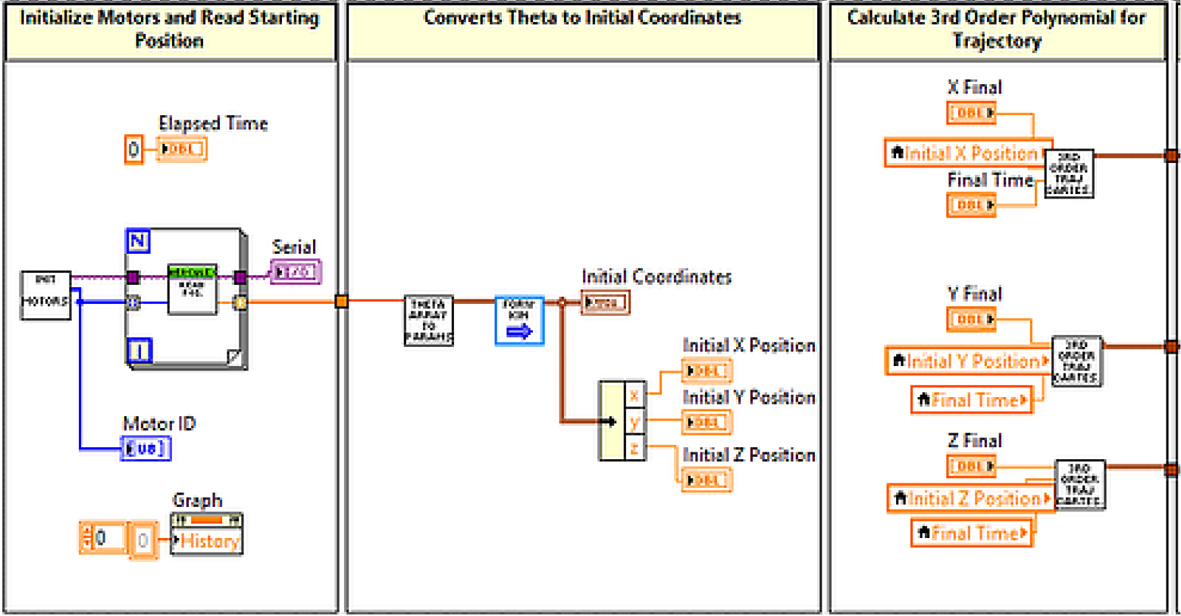
Fully compatible with LabVIEW and MATLAB Simulink
Open Source software structure for customizing desired applications
Functional and structural study of the DELTA robot:
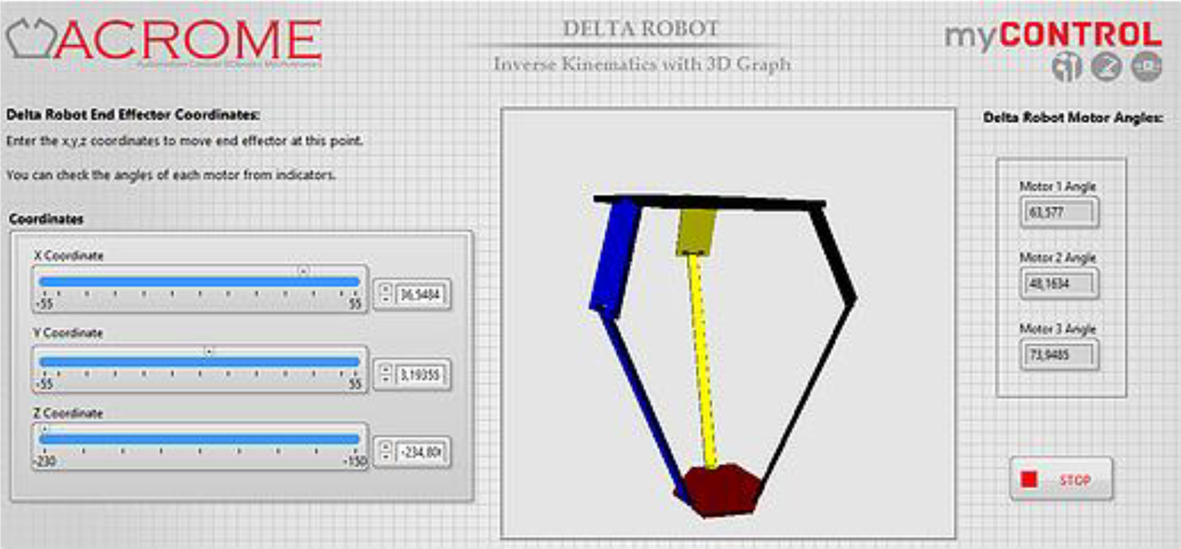
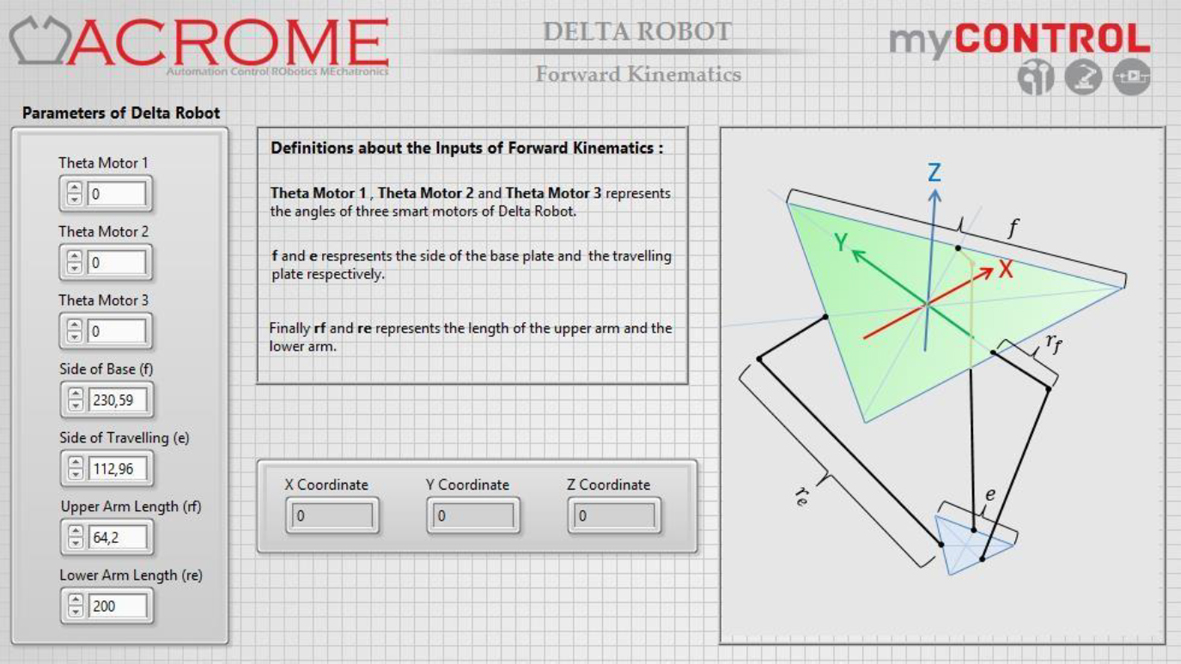
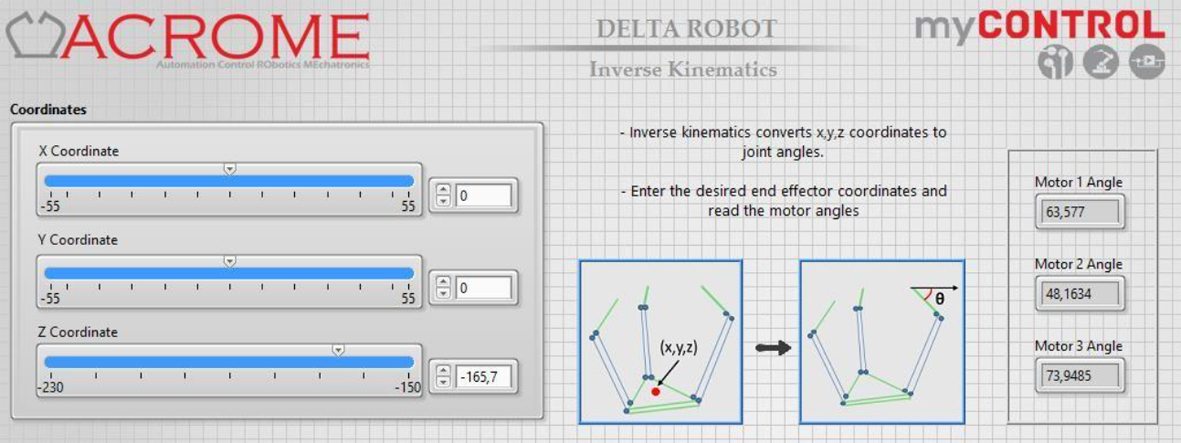
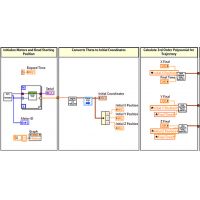
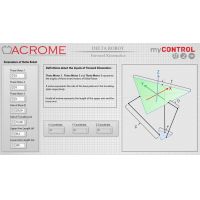
Study of the robot's kinematic models:
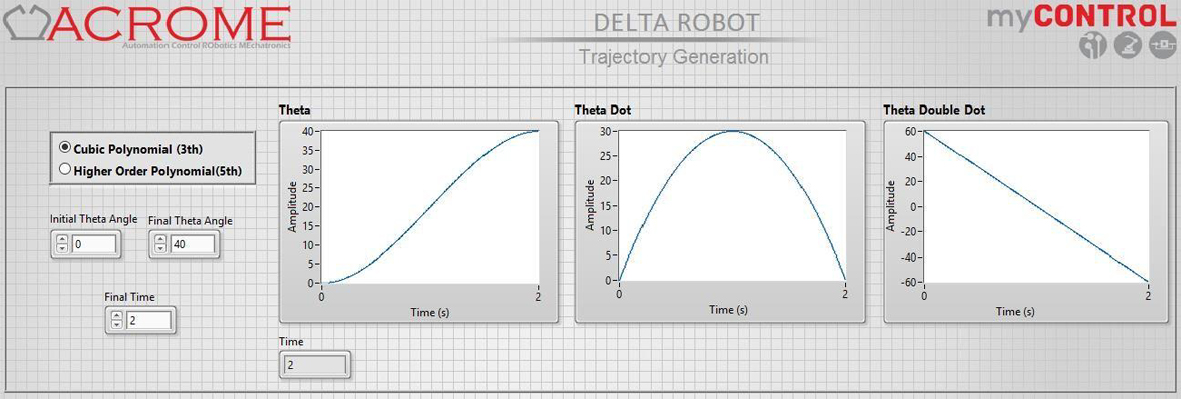
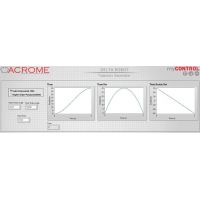
Study of the robot's trajectories:
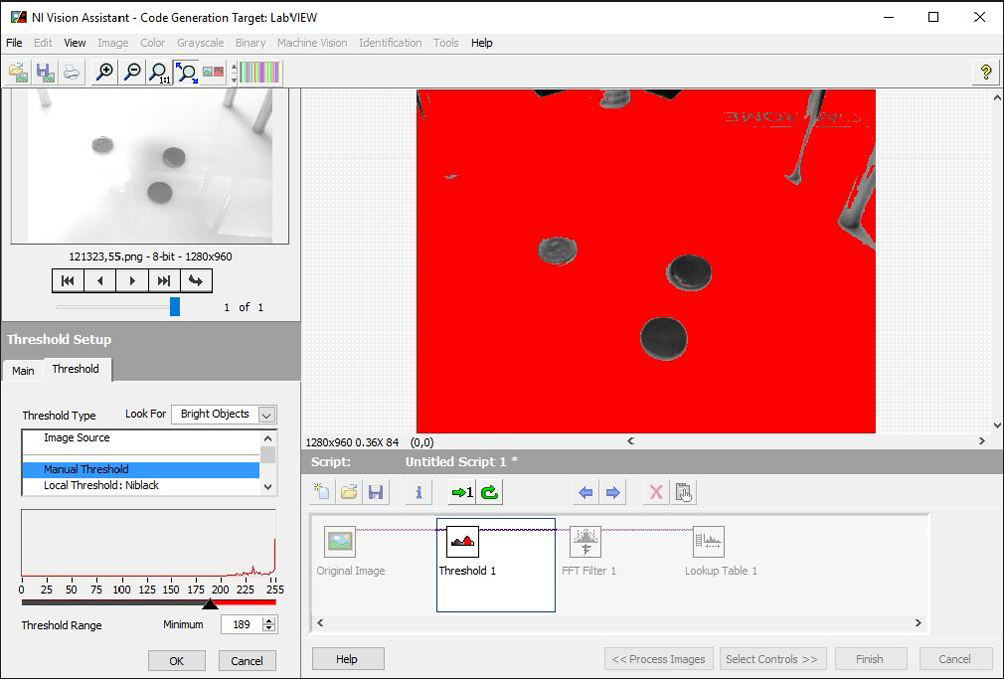
Study of image acquisition and processing:
Educational DELTA robot for learning the fundamentals of robotics
Control system can be customized by users with programming in LabVIEW, MATLAB Simulink, or Python.
Open source programs for creating your own control interfaces.
AO04: DELTA robot
AO01: Control with MyRIO
AO02: Control with Arduino Mega
AC/RPi3: Control with Raspberry Pi 3