 Revenir dans la gamme
Revenir dans la gamme 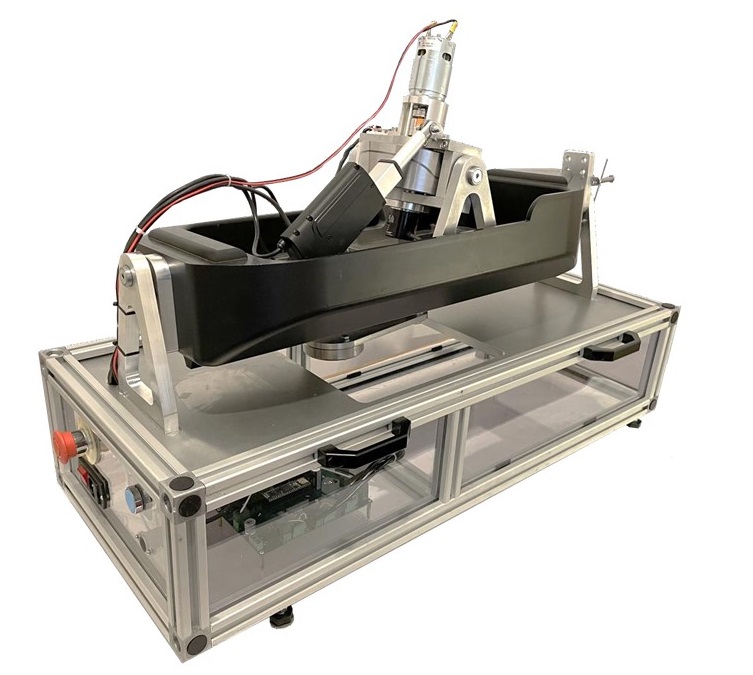

Stabilisateur gyroscopique de bateau
CPGE/Univ
Doc. commercial Eng
 Stabilisateur gyroscopique de bateau
Stabilisateur gyroscopique de bateauDoc. commercial Fr
Vidéo
 Stabilisateur gyroscopique de bateau
Stabilisateur gyroscopique de bateauGammes associées :
CPGE/Univ
Le Stabilisateur gyroscopique de bateau est un produit didactique conçu à partir du système réel, pour l'enseignement des sciences industrielles de l'ingénieur.
Ce produit didactique est dédié aux filières CPGE PCSI/PSI - PTSI/PT, TSI et ATS.
Le stabilisateur possède:
- un volant d'inertie, asservi en vitesse de rotation (jusqu’à 4000 tr/min).
- un cadre support du gyroscope articulé, piloté par un vérin électrique, asservi en vitesse de rotation permettant d’imposer un couple gyroscopique maîtrisé
- une surcharge articulée pilotée par un vérin électrique, permettant de modifier le centre de gravité du bateau et de lui imposer un mouvement de roulis
Les 3 actionneurs sont équipés d'un codeur, et une centrale inertielle est fixée sur le cadre articulé, autant de mesures permettant de traiter les points suivants du programme :
TP1 : DÉCOUVERTE DES SYSTÈMES
- Analyser l’influence de la position de la surcharge sur le comportement du bateau
- Analyser l’influence de l’orientation et de la vitesse du gyroscope sur le comportement bu bateau
- Identifier les 3 chaînes fonctionnelles
TP2 : ANALYSE GEOMETRIQUE
- Identifier la chaîne structurelle de mise en position de la surcharge afin de déterminer la loi E/S géométrique
- Identifier la chaîne structurelle de mise en position du cadre du gyroscope afin de déterminer la loi E/S géométrique
TP3 : PERFORMANCES ET MODELISATION DES SLCI
- Proposer un modèle de comportement des différents composants de la chaîne d’asservissement en position du mouvement de la surcharge les performances de cet asservissement
- Proposer un modèle de comportement des différents composants de la chaîne d’asservissement en vitesse de l’orientation du volant d’inertie et caractériser les performances de cet asservissement
TP4 : CORRECTEUR
- Choisir un correcteur en fonction du comportement en boucle ouverte de l’orientation du gyroscope
TP5 : MODELISATION DES ACTIONS MECANIQUES
- Déterminer la gîte du bateau en fonction de la position de la surcharge afin d’en déduire l’orientation d’équilibre de l’ensemble
TP6: CINETIQUE
- Déterminer l’inertie équivalente de la chaîne de puissance associée à la vitesse de rotation du volant d’inertie
TP7: ENERGETIQUE
-Décrire le processus de démarrage du volant d’inertie permettant de minimiser la consommation énergétique (limitée sur un bateau)
TP8 : DYNAMIQUE, COUPLE GYROSCOPIQUE
- Étude de l’effet gyroscopique : déterminer la relation entre la vitesse de rotation du cadre du volant d’inertie et le comportement dynamique du bateau
TP9 :OPTIMISATION ENERGETIQUE DU DEMARRAGE DU VOLANT D'INERTIE
- Répondre à la problématique de la disponibilité d’énergie électrique à bord d’un bateau : mettre en œuvre une résolution numérique d’intelligence artificielle (IA) qui permette de déterminer la procédure de démarrage du volant d’inertie la moins énergivore
- Un dossier technique avec les détails de calculs de modélisations géométrique, cinématique et dynamique
- Un dossier pédagogique avec les activités de TP rédigées et corrigées
- Un modèle volumique Solidworks directement exploitable pour des simulations sous Meca3D
- Les schémas cinématiques paramétrés pour une exploitation/adaptation aisées des activités de travaux pratiques
S2I//1900 : Stabilisateur gyroscopique de bateau